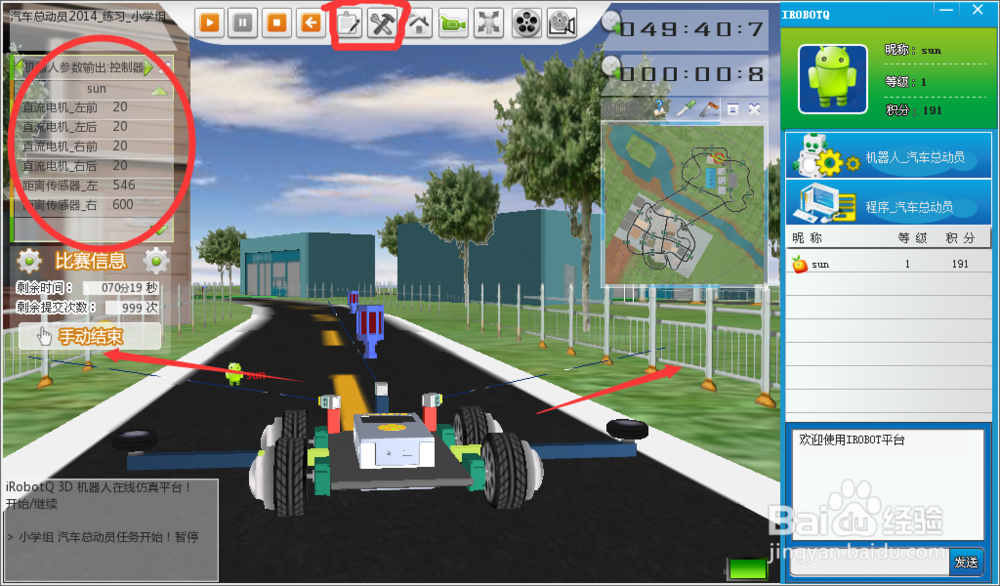
1、任务分析——进入汽车总动员项目的三维场景,观察汽车运动的道路及周围可利用的参照物如道路标线、路边护栏等,并分析不同参照物的效率高低,确定选择路两边护栏作为参照物,可通过测距传感器来获得参照信息。通过以上分析可确定基础解决方案。

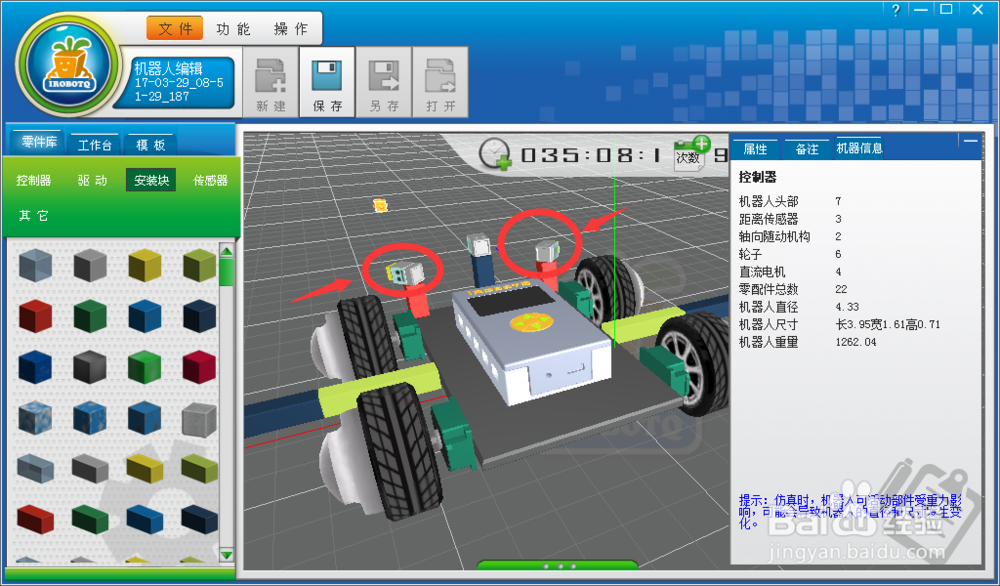
2、设计机器人——基于基础解决方案设计一个具有运动结构(有四轮运动结构),并能获取道路两边护栏距离信息(两边各安装距离传感器)的机器人。
3、设计算法——通过比较两边距离传感器返回的护栏距离值的差值,来确定车子在道路中的位置信息,进而分析会有三种位置状态出现:
1、左边大于右边(表示车子离左边远)、2、右边大于左边(表示车子离右边远)、3、左右两边大概相等(表示车子基本在中间)。
分析三种状态后可推出三种状态下车子的后续动作应为:1、左转,2、右转,3、前进。
三个条件,通过两个条件判断嵌套实现分支,外加一个永远循环实现实时判断和姿态调整。
为了让车子调整不过于频繁,我们把左右两边的差值给一个冗余量比如100,表示我们可以接受车子在道路的相对中间就可以了。

4、运行调试——将制作好的机器人和程序加载进入汽车总动员(无人驾驶)场地,观察运动姿态并进行实时调试。