1、OpenCV卷积函数filter2D():
形式:
CV_EXPORTS_W void filter2D( InputArray src,
OutputArray dst,
int ddepth,
InputArray kernel,
Point anchor=Point(-1,-1),
double delta=0,
int borderType=BORDER_DEFAULT );
功能:利用内核实现对图像的卷积运算;
参数:
InputArray src: 输入图像;
OutputArray dst: 输出图像,和输入图像具有相同的尺寸和通道数量;
int ddepth: 目标图像深度;
原图像和目标图像支持的图像深度如下:
src.depth() = CV_8U, ddepth = -1/CV_16S/CV_32F/CV_64F
src.depth() = CV_16U/CV_16S, ddepth = -1/CV_32F/CV_64F
src.depth() = CV_32F, ddepth = -1/CV_32F/CV_64F
src.depth() = CV_64F, ddepth = -1/CV_64F
当ddepth输入值为-1时,目标图像和原图像深度保持一致;
InputArray kernel: 卷积核,一个单通道浮点型矩阵。如果想在图像不同的通道使用不同的kernel,可以先使用split()函数将图像通道事先分开。
Point anchor: 内核的基准点(anchor),其默认值为(-1,-1)说明位于kernel的中心位置。基准点即kernel中与进行处理的像素点重合的点。
double delta:在储存目标图像前可选的添加到像素的值,默认值为0
int borderType:像素向外逼近的方法,默认值是BORDER_DEFAULT,即对全部边界进行计算。
2、filter2D()示例:
#include <opencv2\opencv.hpp>
using namespace std;
using namespace cv;
int main( int argc, char** argv )
{
Mat raw_img = imread("raw.jpg",1);
if (!raw_img.data)
{
return -1;
}
imshow("before",raw_img);
Mat mask_img = (Mat_<char>(3,3) << 0,-1,0,-1,5,-1,0,-1,0);
Mat dst_img(raw_img.rows,raw_img.cols,CV_32FC3);
Point anchor = Point(-1,-1);
filter2D(raw_img,dst_img,-1,mask_img,anchor,0,BORDER_DEFAULT);
imshow("before",raw_img);
imshow("after",dst_img);
waitKey( 0 );
return 0;
}


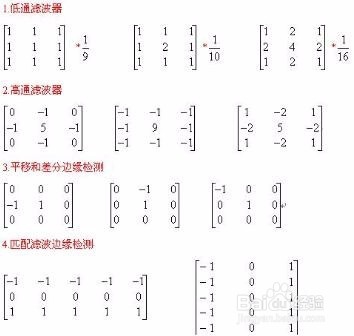
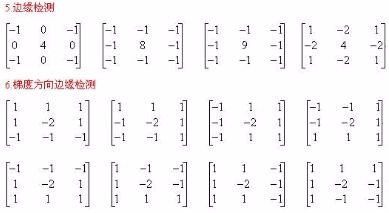
3、常见卷积模板:
模板:矩阵方块,其数学含义是一种卷积运算;
卷积运算:是加权求和的过程;所有乘积之和作为区域中心像素的新值;
卷积示例:
3*3的像素区域R与卷积核G的卷积运算(中心像素)
R5=R1G1+R2G2+R3G3+R4G4+R5G5+R6G6+R7G7+R8G8+R9G9;
常见模板如下:
滤波是图像处理的基本操作,滤波去除图像中的噪声,提取感兴趣的特征,允许图像重采样。
图像中的频域和空域:空间域指用图像的灰度值来描述一幅图像;而频域指用图像灰度值的变化来描述一幅图像。而低通滤波器和高通滤波器的概念就是在频域中产生的。
低通滤波器:指去除图像中的高频成分,使边缘平滑;
而高通滤波器:指去除图像中的低频成分,使边缘提取与增强;

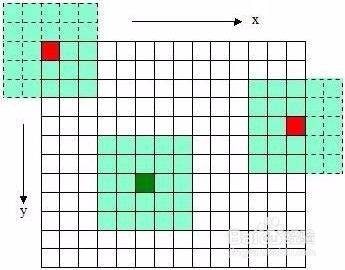
4、卷积边界问题:
当处理图像边界像素时,卷积核与图像使用区域不能匹配,卷积核的中心与边界像素点对应,卷积将出现问题。
处理方法:
A.忽略边界像素,即处理后的图像将丢掉这些像素;
B.保留原边界像素,即copy边界像素到处理后的图像;
5、自定义卷积运算:
#include <opencv2\opencv.hpp>
using namespace std;
using namespace cv;
//kernel(-1,-2,1;4,-2,-1;4,-2,2);
void Sharpen(Mat& myImage, Mat& Result)
{
int nChannels = myImage.channels();
Result.create(myImage.size(), myImage.type());
for (int j = 1; j < myImage.rows - 1; ++j) //hang
{
unsigned char *previous = myImageNaNr<unsigned char>(j-1);//上一行数据的指针
unsigned char *current = myImageNaNr<unsigned char>(j);//当前行数据的指针
unsigned char *next = myImageNaNr<unsigned char>(j+1);//下一行数据的指针
unsigned char *output = ResultNaNr<unsigned char>(j); //输出图像当前列数据的指针
for (int i = 1; i < myImage.cols - 1; ++i)//lie
{
output[i] += saturate_cast<uchar>(
-1*previous[i-1]-2*previous[i]+1*previous[i+1]
+4*current[i-1]-2*current[i]-1*current[i+1]
+4*next[i-1]-2*next[i]+2*next[i+1]) ;
}
}
// 将边界设为0
Result.row(0).setTo(Scalar(0));
Result.row(Result.rows - 1).setTo(Scalar(0));
Result.col(0).setTo(Scalar(0));
Result.col(Result.cols - 1).setTo(Scalar(0));
}
int main(){
Mat img = imread("raw.jpg",0);
Mat src;
Sharpen(img, src);
imshow("img", img);
imshow("src",src);
waitKey(0);
return 0;
}
6、示例:
#include <opencv2\opencv.hpp>
using namespace std;
using namespace cv;
Mat Gaussian_kernal(int kernel_size,float sigma);
Mat z_Sharpen(Mat raw_img,Mat kernel_img);
int main( int argc, char** argv )
{
Mat raw_img = imread("raw.jpg",0);
imshow("before",raw_img);
int kernel_size =3;
float sigma = 1.4;
Mat kernel_img = Gaussian_kernal(kernel_size,sigma);
cout<<kernel_img<<endl;
//float myArray[3][3] =
//{
// -1, -2, 1,
// 4, -2, -1,
// 4, -2, 2
//};
//Mat kernel_img = Mat(3, 3, CV_32FC1, myArray);//创建矩阵
Mat dst_img = z_Sharpen(raw_img,kernel_img);
imshow("after",dst_img);
waitKey( 0 );
return 0;
}
Mat z_Sharpen(Mat raw_img,Mat kernel_img)
{
int m_width = raw_img.cols;//kuan
int m_height = raw_img.rows;//gao
int kernel_size = kernel_img.cols;
int k_size = (kernel_size-1)/2;
Mat dst_img(m_height,m_width,CV_8UC1);
for (int j=k_size;j<m_width-k_size;j++)//lie
{
for (int i=k_size;i<m_height-k_size;i++)//hang
{
unsigned char *current = dst_imgNaNr<unsigned char>(i);//dang qian hang
int m_J = -k_size;//lie
for (int m=0;m<kernel_size;m++)
{
float *k_data = kernel_imgNaNr<float>(m);
int m_I = -k_size;//hang
for (int n=0;n<kernel_size;n++)
{
unsigned char *p_data = raw_imgNaNr<unsigned char>(i+m_I);
current[j] += saturate_cast<unsigned char>(p_data[j+m_J]*k_data[n]);
m_I++;
}
m_J++;
}
}
}
//将边界设为0
for (int i=0;i<k_size;i++)
{
dst_img.row(i).setTo(Scalar(0));
dst_img.col(i).setTo(Scalar(0));
}
for(int i=m_height-k_size;i<m_height;i++)
{
dst_img.row(i).setTo(Scalar(0));
}
for(int i=m_width-k_size;i<m_width;i++)
{
dst_img.col(i).setTo(Scalar(0));
}
return dst_img;
}
Mat Gaussian_kernal(int kernel_size,float sigma)
{
const double PI = 3.14159265358979323846;
int m = kernel_size / 2;
Mat mask_temp(kernel_size,kernel_size,CV_32FC1);
float s_2 = 2*sigma*sigma;
for (int i=0;i<kernel_size;i++)
{
for (int j=0;j<kernel_size;j++)
{
int x=i-m;
int y=j-m;
mask_tempNaNr<float>(i)[j] = exp(-(x*x+y*y)/2*s_2) /(PI*s_2);
}
}
return mask_temp;
}
