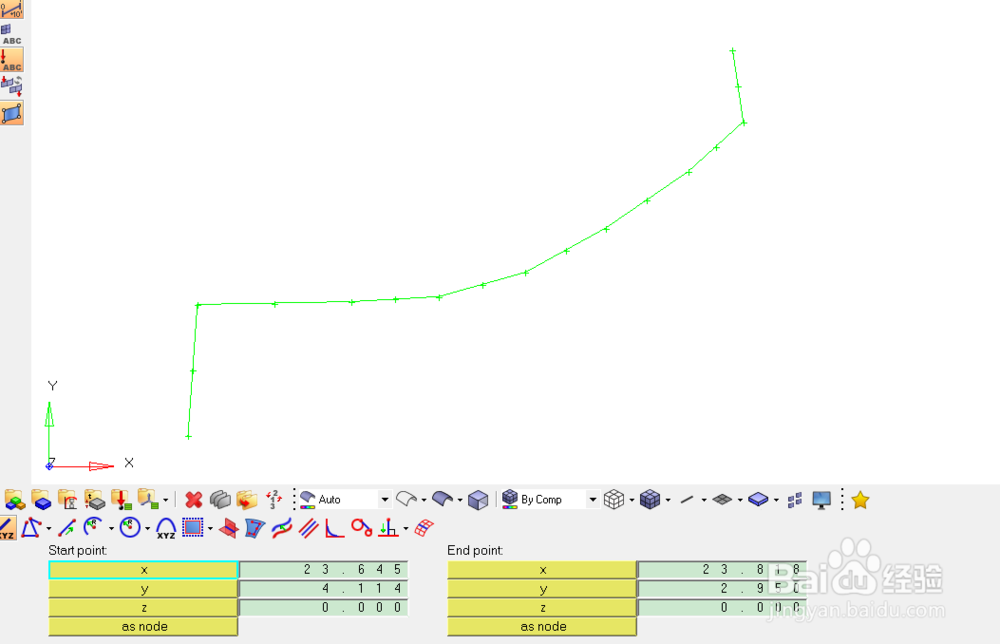
1、1)利用HyperMesh建立齿轮的轮廓关键点,(14.849,-2.121)、(15,0)、(17.481,4.473e-02)、(18.899,1.253e-01)、(20.300,5.190e-01)、(21.596,1.234)、(22.927,2.145)、(23.818,2.950)、(23.645,4.114),连接成线如下:
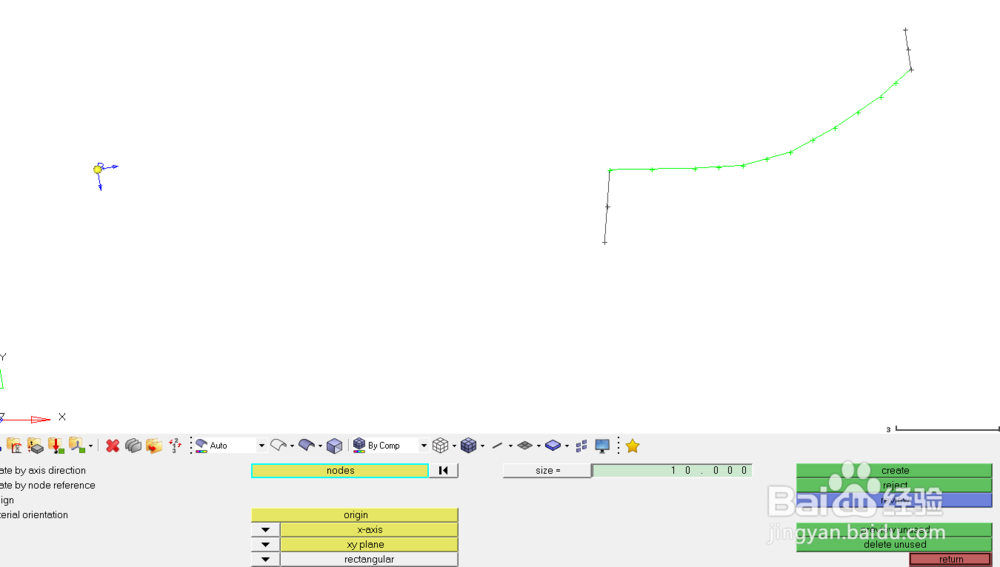
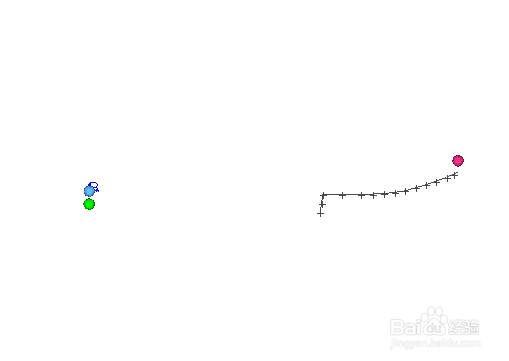
2、2)点击Node创建中心节点(0,0,0),在中心节点创建坐标系如下,点击Analysis>systems>以中心节点到线段末点所在直线为X轴:
3、3)点击Tool>reflect>Lines,将所有的线段选中,沿新建立的坐标系X轴在XY平面内对称:
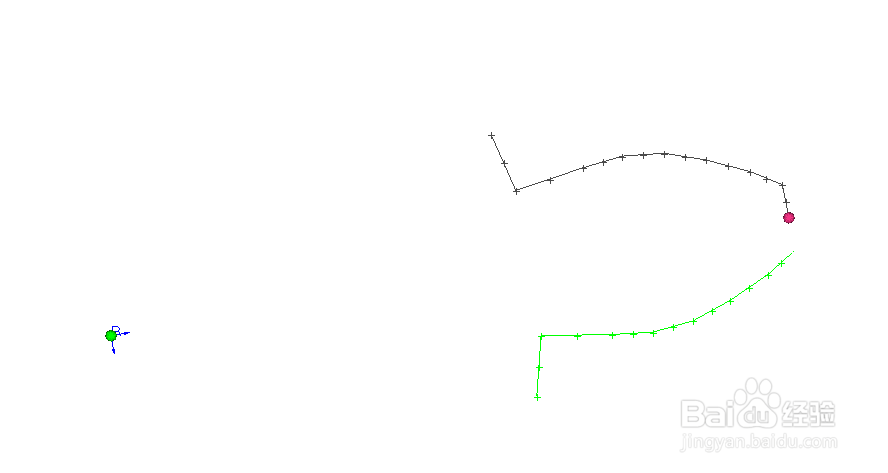
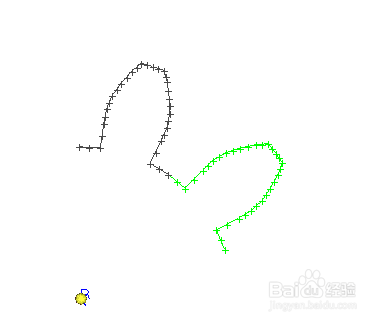
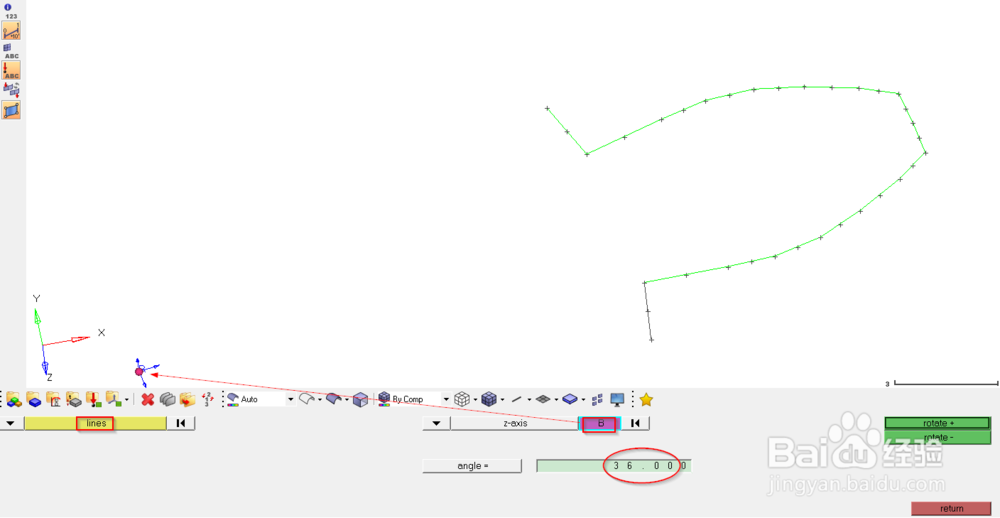
4、4)点击rorate>lines>选择沿Z轴绕中心节点旋转36°,点击Lines>displayed>Duplicate>Orignial group:
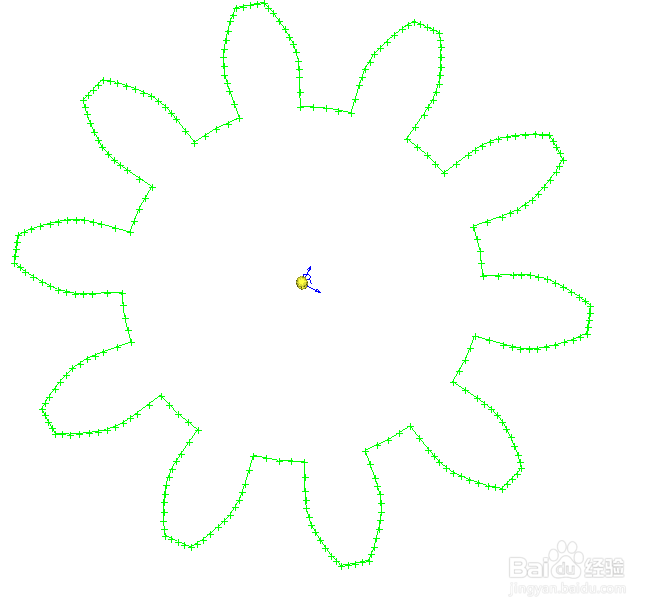
5、5)重复步骤4的旋转操作,直到完成整个齿轮轮廓的创建,点击Geom>line edit>combine,将所有的线进行合并如下(注意,最好是先将线合并再进行旋转操作):
6、6)点击Geom>surface>By lines>create:
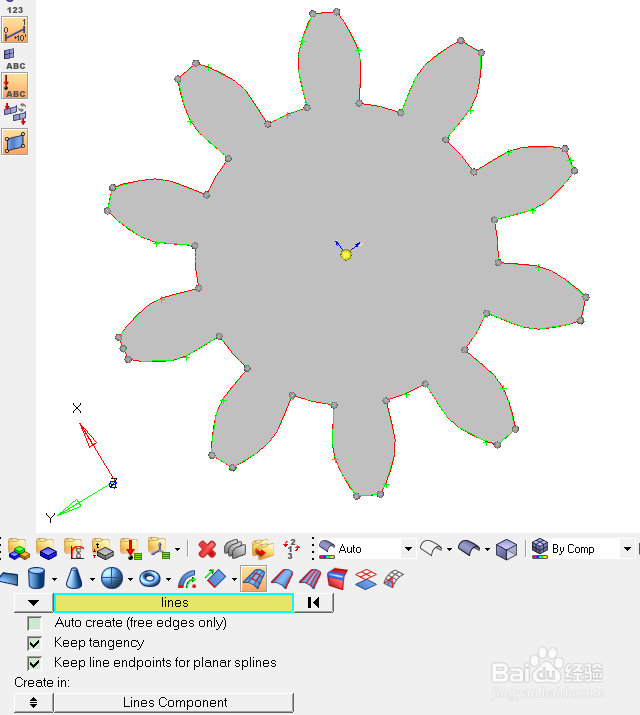
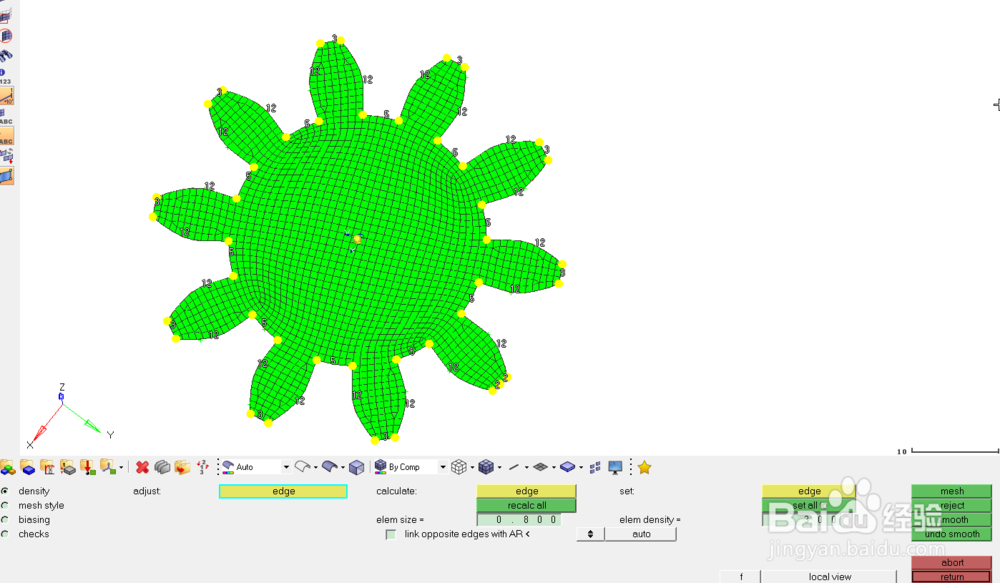
7、7)点击F12,进行面网格划分,利用0.8的尺寸划分网格如下: