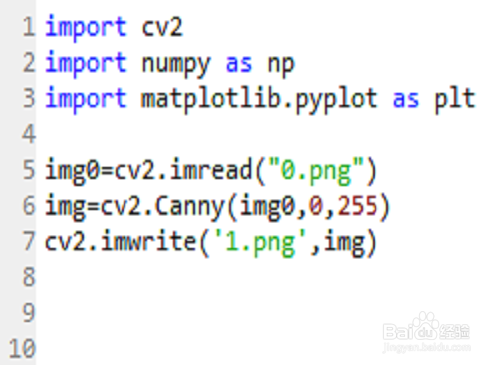
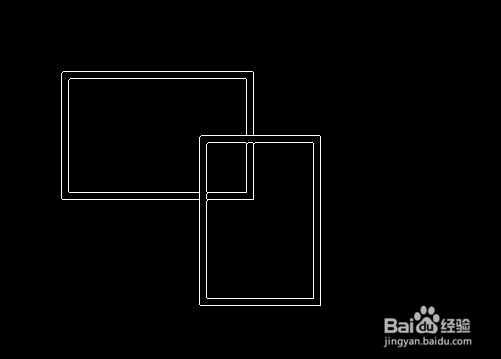
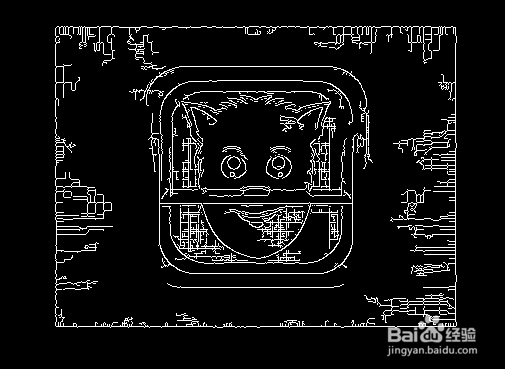
1、先检测图像边界。
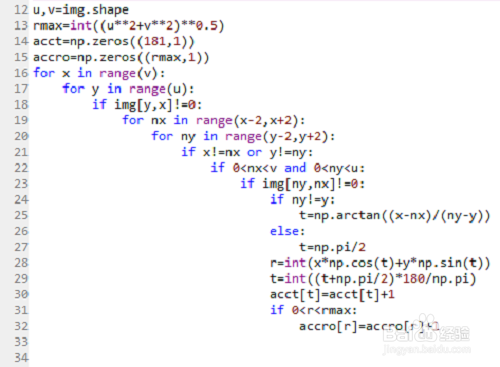
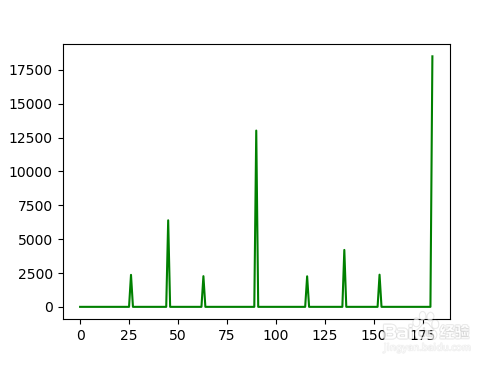
2、检测图像中可能存在的直线的倾角和到原点的距离。
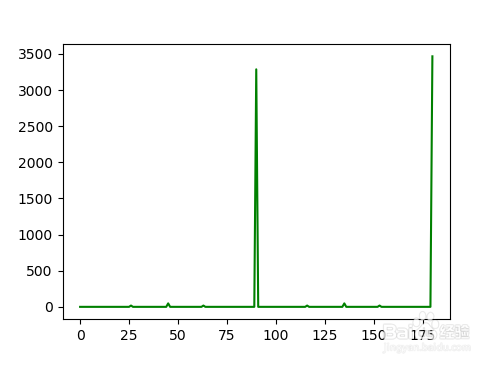
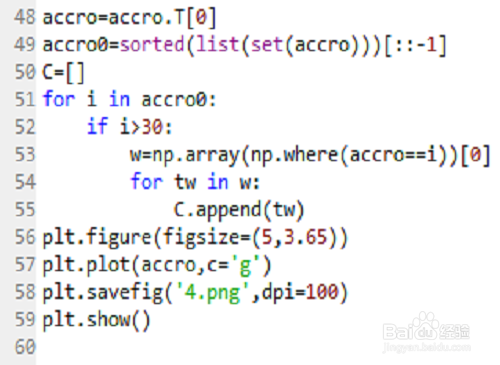
3、倾角的集合,我只选出像素数目较多的那一些。
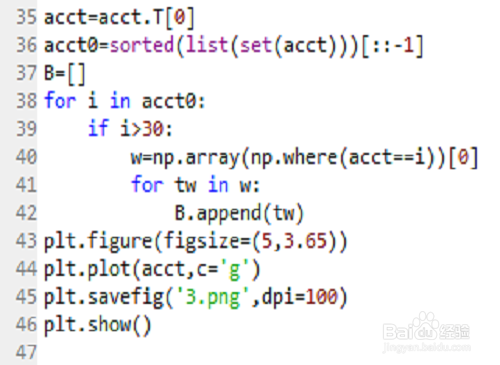
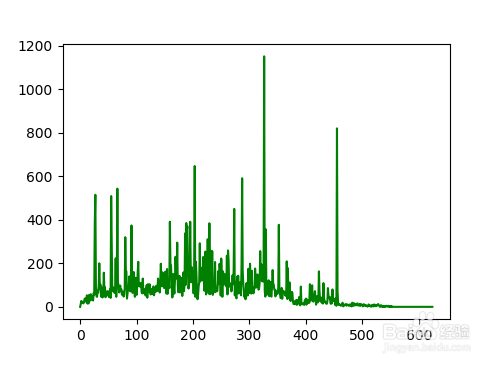
4、距离的集合,也选择像素数目较多的那一些。
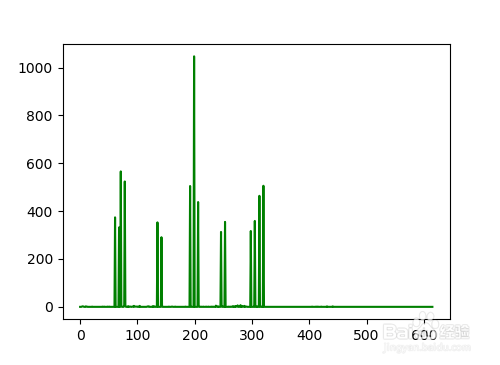
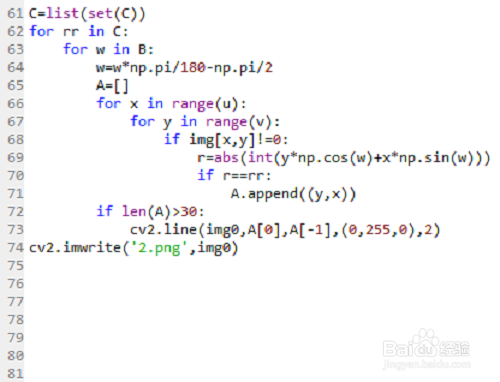
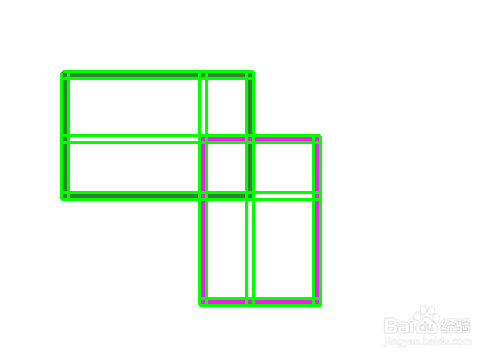
5、每一个倾角和距离,都确定一条固定的直线。
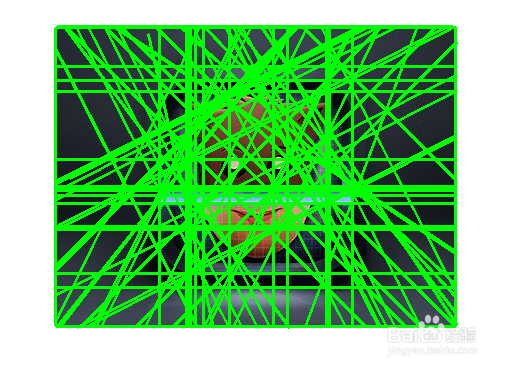
下面就要绘制出途中像素数目较多的直线。
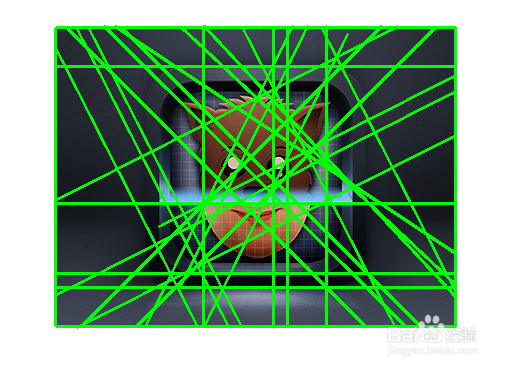
6、最后的绘图效果如下。
7、换另一个例子试验。

8、本文的方法,与opencv内置方法对比一下。

1、先检测图像边界。
2、检测图像中可能存在的直线的倾角和到原点的距离。
3、倾角的集合,我只选出像素数目较多的那一些。
4、距离的集合,也选择像素数目较多的那一些。
5、每一个倾角和距离,都确定一条固定的直线。
下面就要绘制出途中像素数目较多的直线。
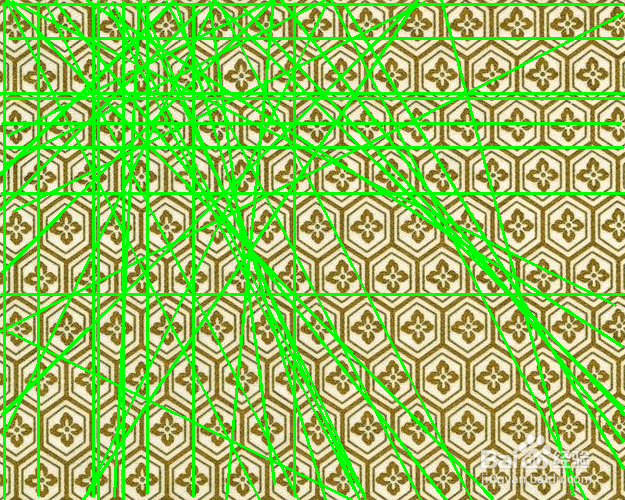
6、最后的绘图效果如下。
7、换另一个例子试验。
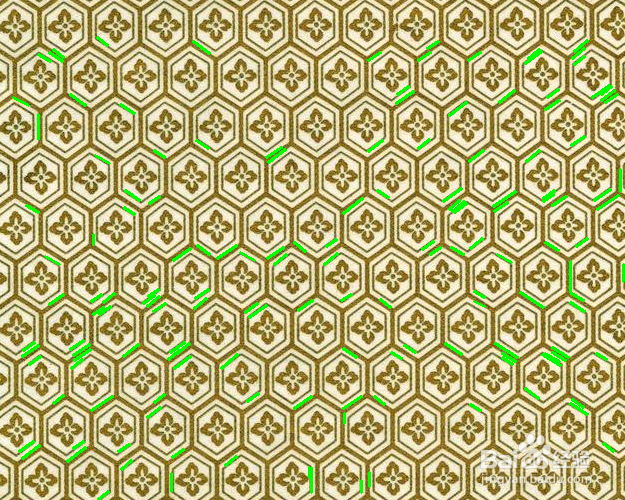
8、本文的方法,与opencv内置方法对比一下。