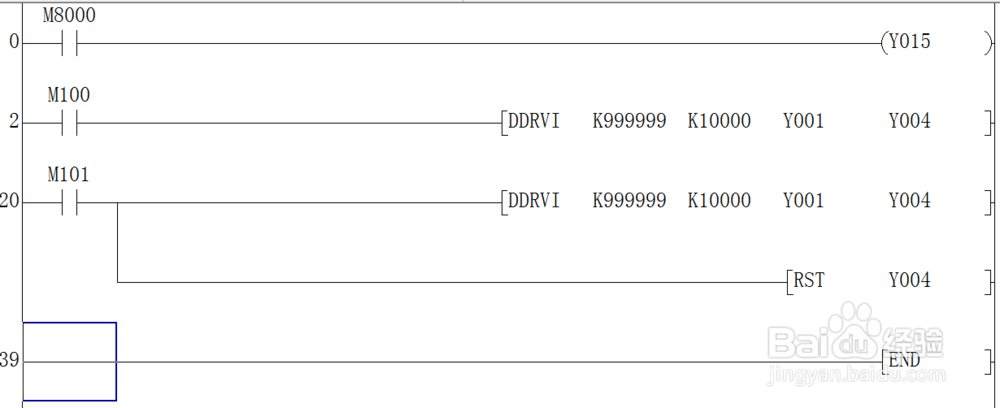
1、做初始化首先要控制伺服正转和反转;
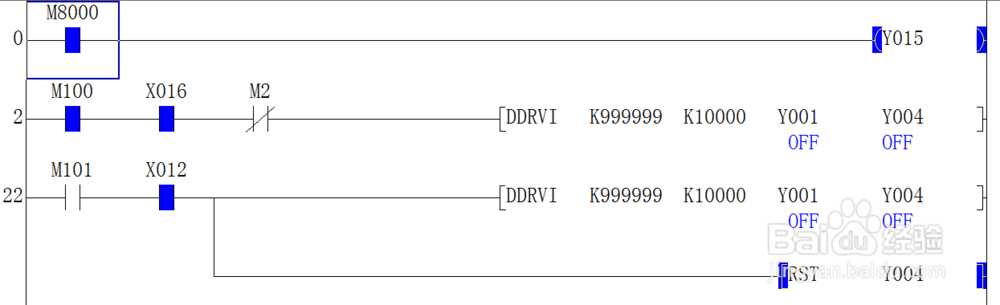
M8000 是三菱PLC软元件,开机后自动导通。而y15是伺服启动讯号,
M100 软元件控制伺服正传;M101软元件控制伺服反转。[ DDRVI K999999 K10000 Y001 Y004 ]语法中:K999999 是指伺服无限运动;K10000 是指每秒钟向伺服驱动发送10000个脉冲;Y001是脉冲接收端口;Y004 是控制伺服旋转方向。
2、控制伺服在接近上极限和下极限时停止运动
目前上下极限以及原点感应器处于常闭状态,意思是感应灯一直亮,直到感应到金属靠近时感应灯才会熄灭。
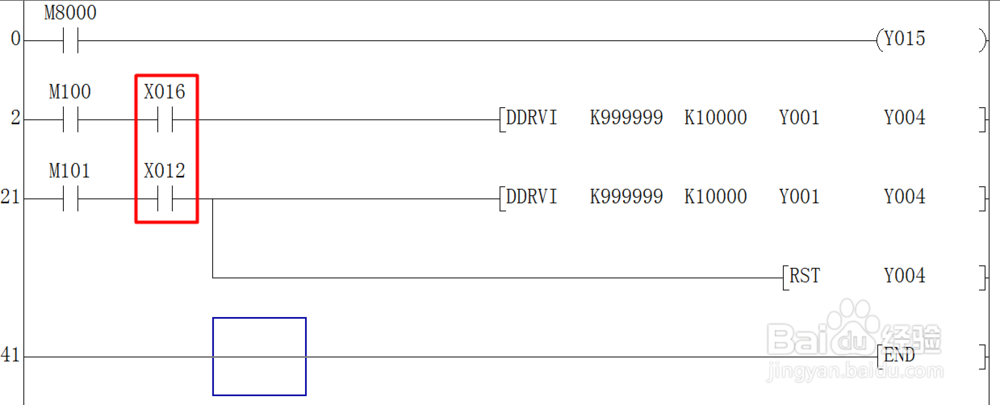
3、当伺服接近极限停止运动时,命令伺服向相反的方向运动
当上极限感应器X16感应到时M101便会导通,M101导通之后伺服便会开始反向旋转。

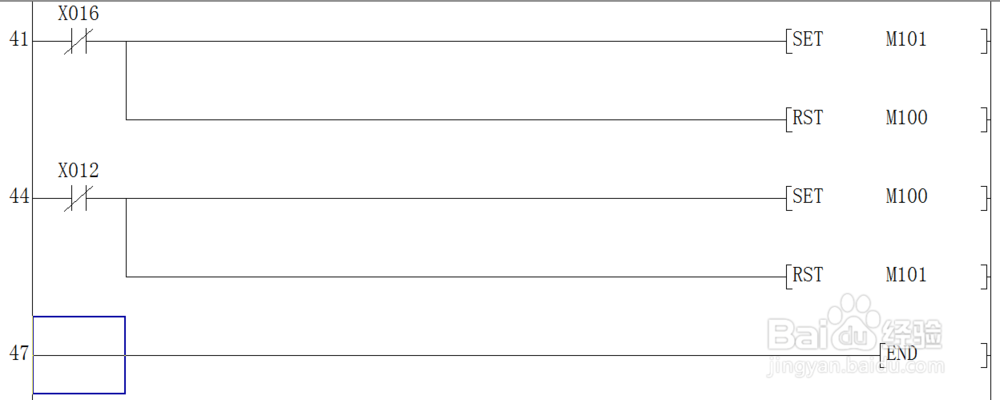
4、另外,当正转极限到位时M100其实还是处于常闭状态,所以在我们开始反转的时候需要初始化M100的值。M101也是如此;
写到这里如果送电的话,伺服会在上下极限之间不停的来回运动。
5、当伺服接触到原点感应器就停止,初始化运动即完成。
如图,不过这样会有个弊端,因为你不知道他到底是从上极限过来接触到原点的;还是从下极限过来接触到原点的。
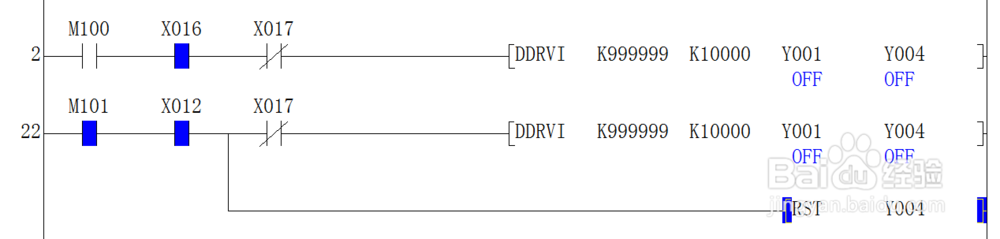
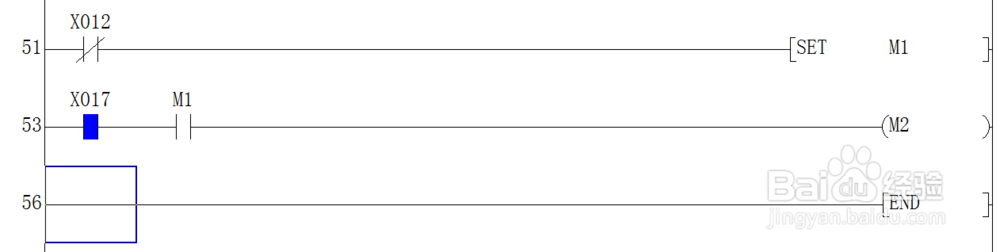
6、假定我们需要伺服从下极限正转时接触原点再停止,则需要侦测下极限讯号。
当下极限X12常闭变常开时,M1便会导通,而当M1导通时只要等到X17由常闭变常开,M2便会导通。M2导通说明伺服已经移动到靠近下极限的原点位置。此时便可以停止运动了。
7、如此便完成了伺服初始化的动作,但是这个动作需要通过点击软元件M100,所对应的按钮会开关来实现初始化。如果需要开机便自动进行初始化的话需要再加一个命令【M8002】M8002用于PLC的初始化,PLC每次断电重启后M8002就会执行一次。
这样,当设备初次送电时,M100便会自动导通,并执行初始化动作。
