1、如下图所示,
打开UG10.0软件,新建一空白的模型文件,
另存为:UG10.0练习三维建模二百零四之摇杆
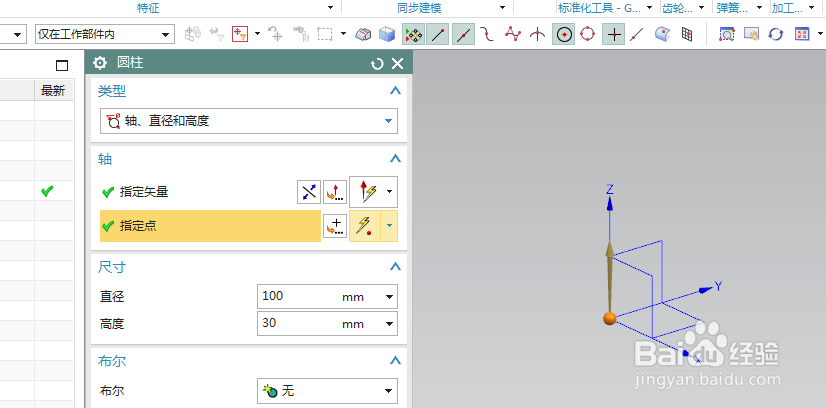
2、如下图所示,
执行【菜单——插入——设计特征——圆柱体】,
指定矢量Z轴,指定点:坐标原点,
设置尺寸:直径100,高度30,
点击应用。
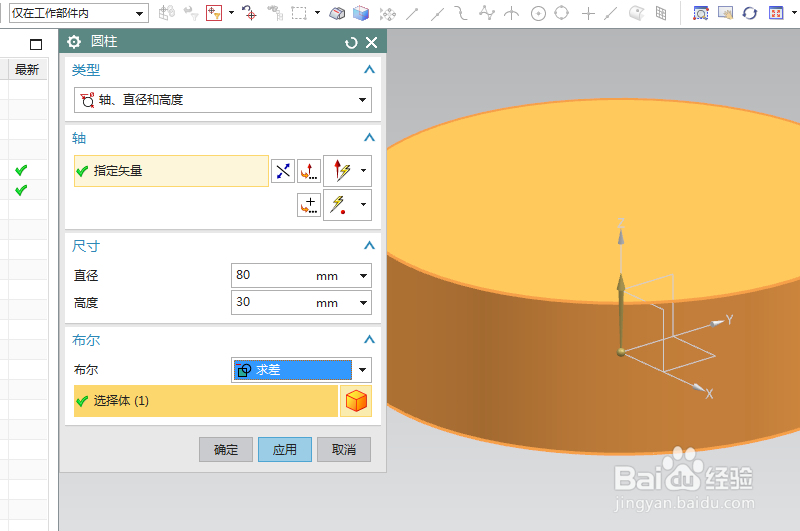
3、如下图所示,
指定矢量Z轴,
修改直径为80,
布尔求差,
点击确定。
4、如下图所示,
执行【拉伸——XY平面】,直接进入草图。
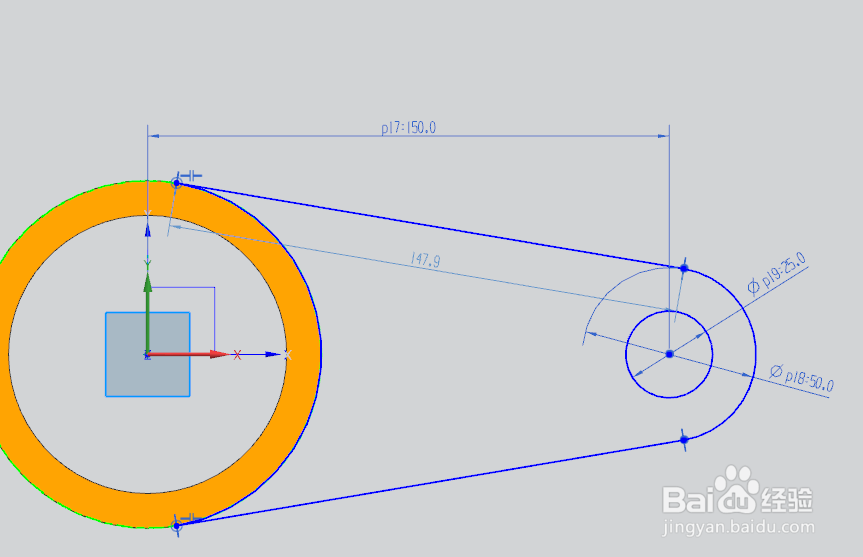
5、如下图所示,
激活投影曲线命令,将圆外轮廓投影出来,
激活圆命令,画两个圆,同心,添加几何约束,圆心在横轴上,双击修改小圆直径为ø25,大圆直径为ø50,
激活直线命令,画两条相切线,
激活快速修剪命令,修剪两个圆成圆弧,
点击完成,退出草图。
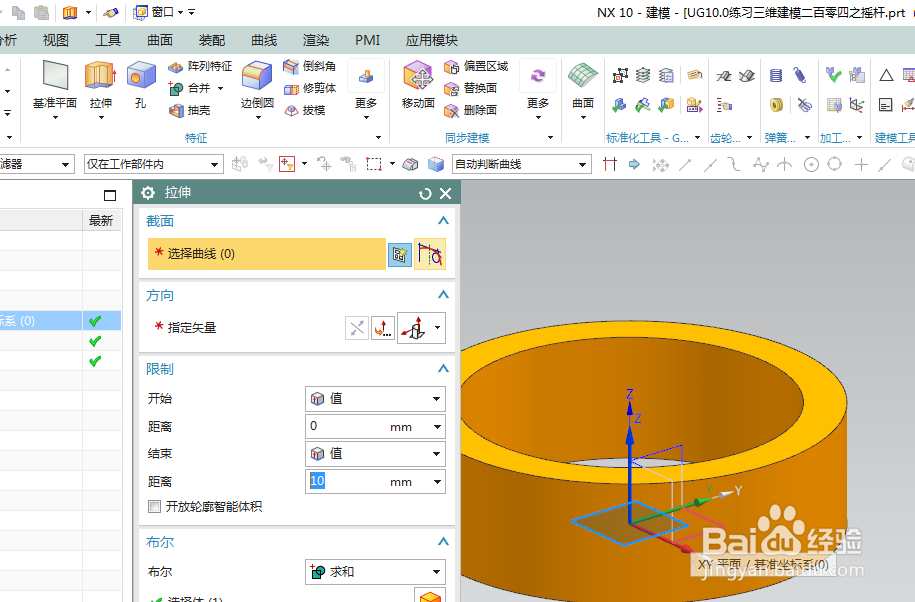
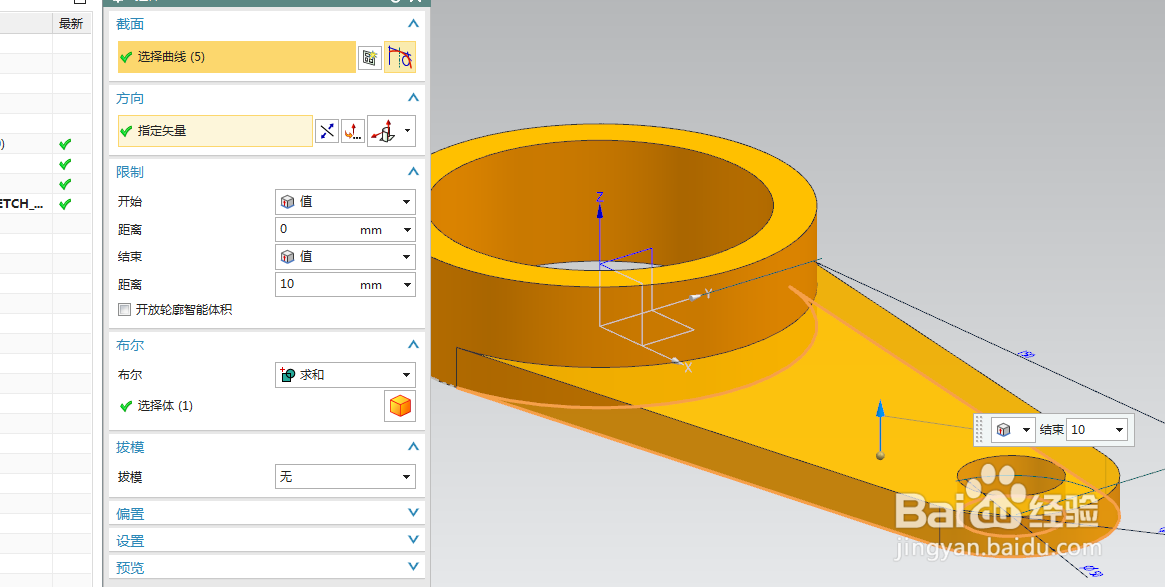
6、如下图所示,
设置限制:0开始,10结束,
布尔求和,
点击确定。
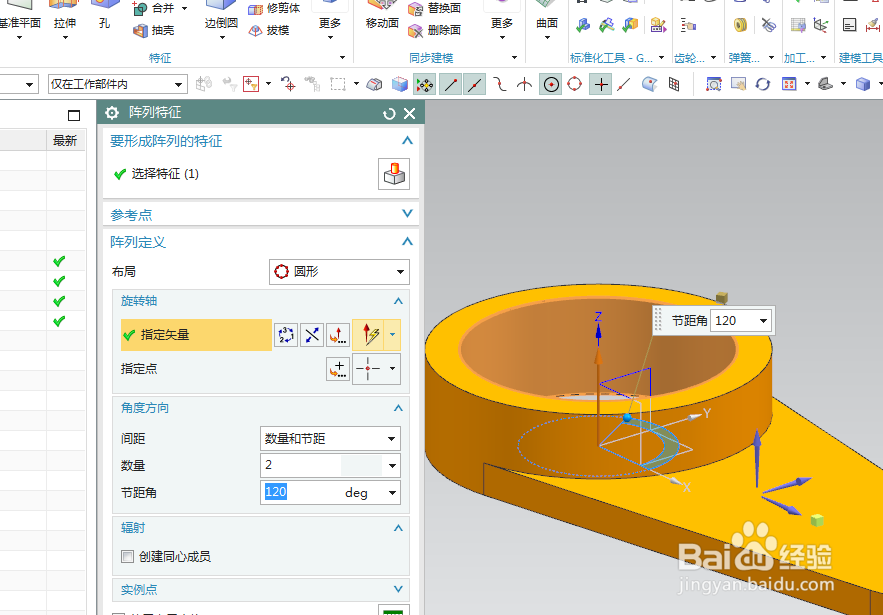
7、如下图所示,
执行【菜单——插入——关联复制——阵列特征】,
选中刚刚的拉伸特征,设置布局为圆形,
指定矢量Z轴,数量2,节距角120,
点击确定。
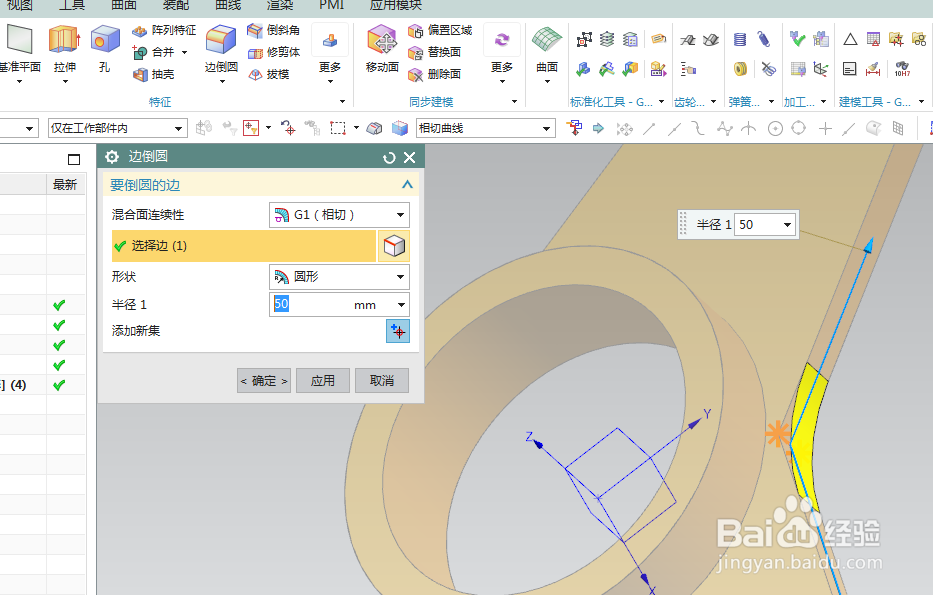
8、如下图所示,
点击工具栏中的边倒圆命令,
点击实体中的交线,设置半径为R50,
点击“应用”。
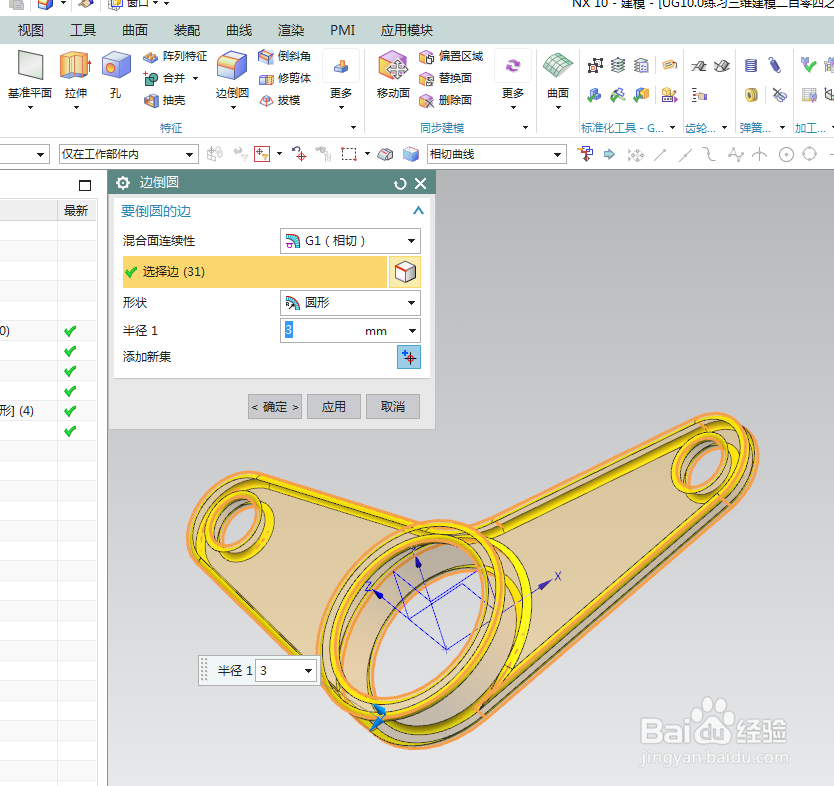
9、如下图所示,
Ctrl+A,选中所有边线,
设置半径为R3,
点击确定。
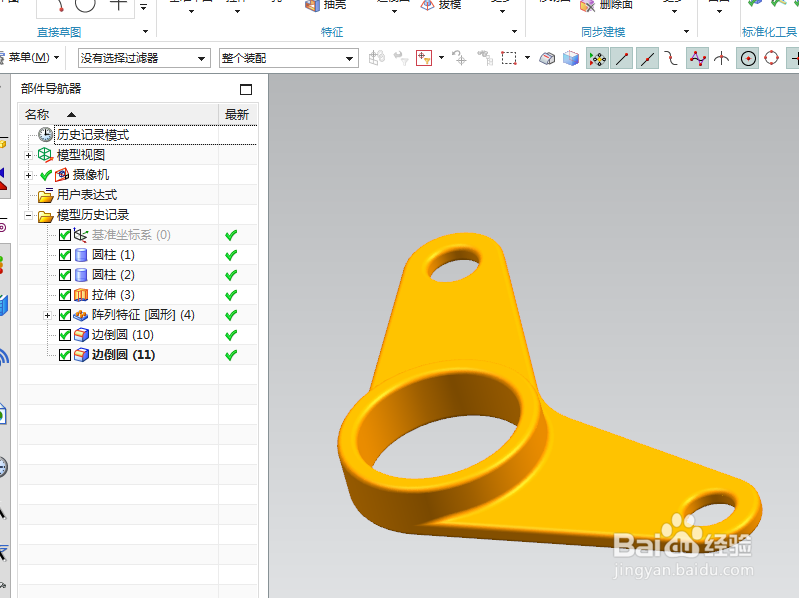
10、如下图所示,
隐藏基准坐标系,显示为着色,
————
至此,
这个摇杆三维建模完成,本次练习结束。