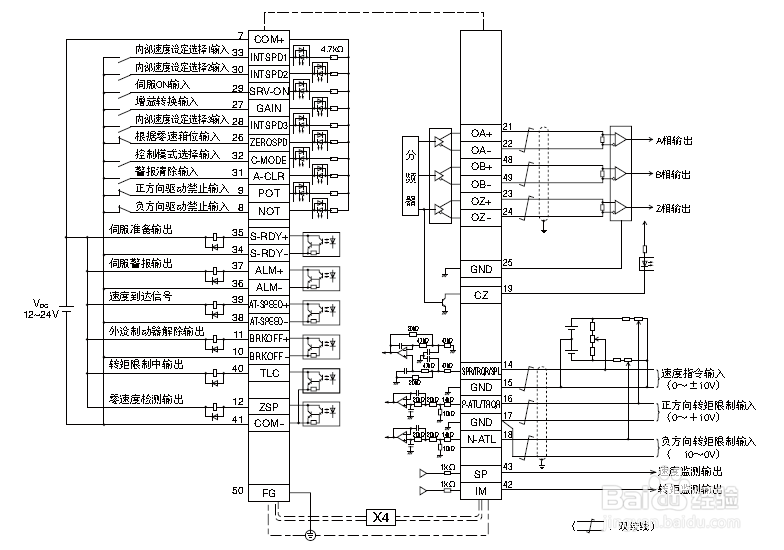
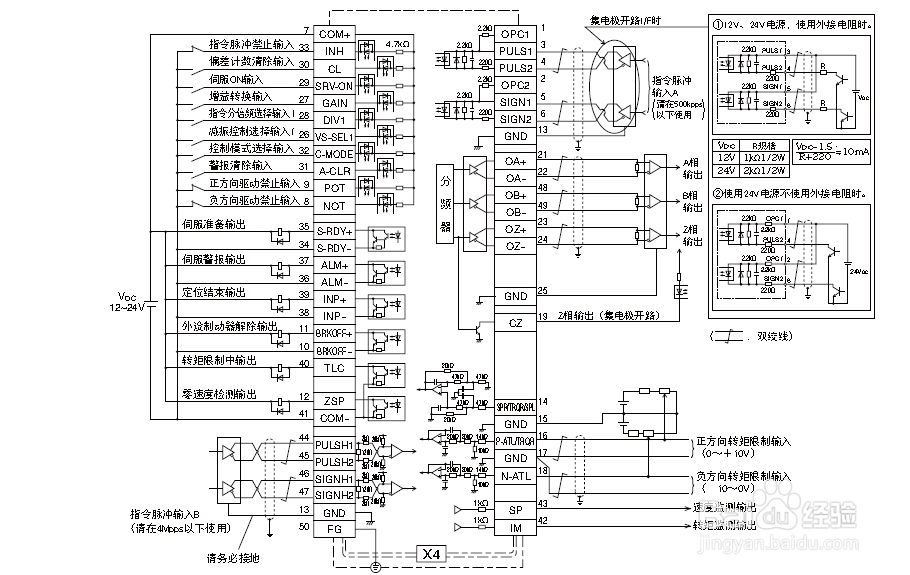
1、首先讲解下海宝系统与松下A5伺服的驱动口速度模式配线
海宝系统是速度模式的上位机,其控制伺服驱动器运转的是模拟电压。
运动是根据海宝系统提供的模拟电压来进行速度控制的
其输出的伺服驱动器报警信号见图的36和37一对引脚,为开关量信号
输入的为DC24V电源和驱动使能信号
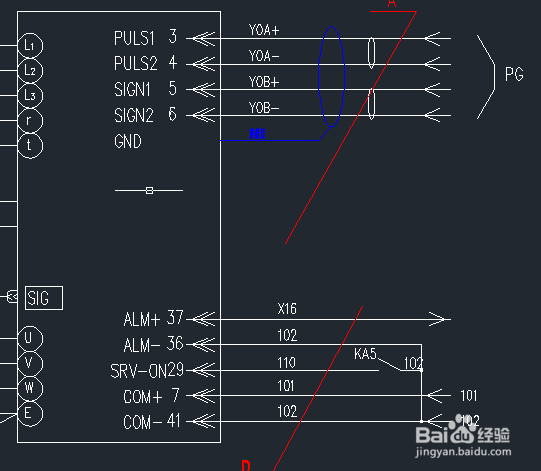
2、如果未使用支持双边台架的系统,那么机床纵向移动的副边为位置模式
伺服驱动器的位置模式配线如图,其实根据脉冲信号来运转的,和主边同步。
报警灯信号和速度模式的是一样的
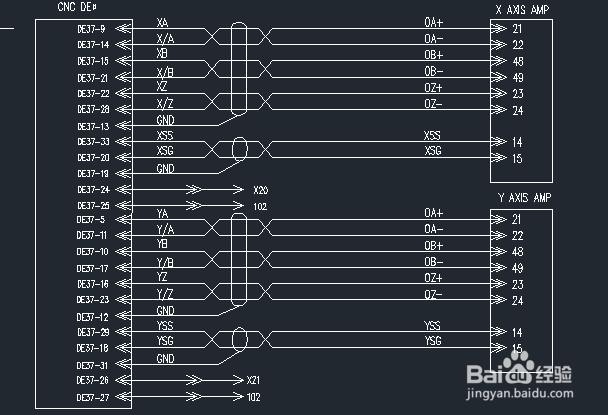
3、系统和伺服器驱动器(松下A5)之间连接的配图
图中的24——25,26——27为两组开关量信号,供外部使用,分别为系统输出的轴使能。
例如图中的102为DC24V的0V,系统的无故障报警时X20和X21两根线均能提供能提供DC24V的0V。
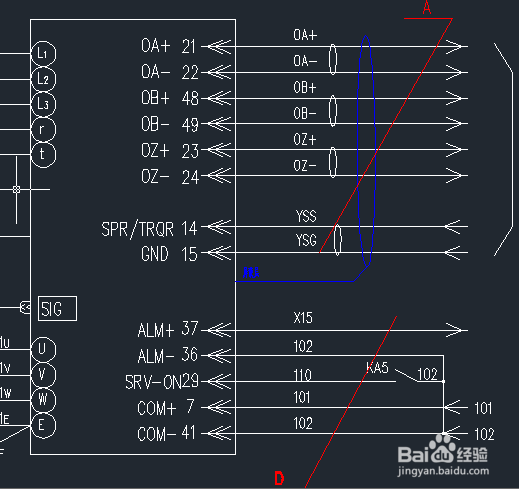
4、伺服驱动器侧接线实图(仅以松下A5伺服为例)
附图1为速度模式,连接之后还需连接副边的位置模式伺服驱动器
位置模式的连接见附图2
比较两图均可发现共同的引脚。其含义在之前的图中已经标明。
5、接下来讲讲调试参数吧
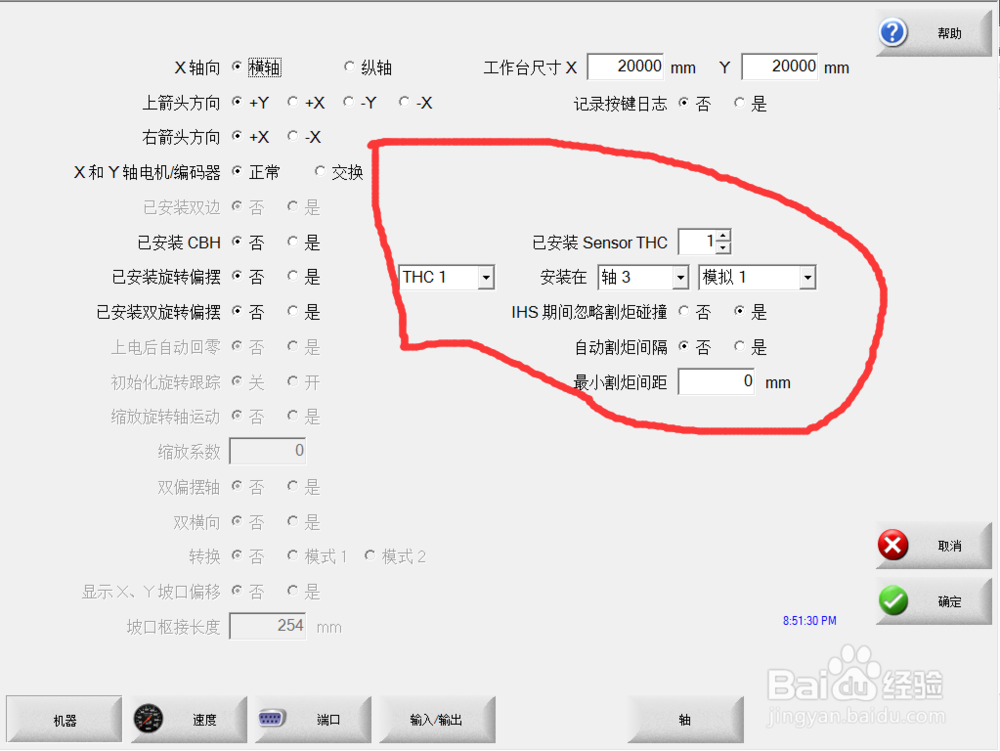
系统里面一般供机床使用的为横轴和纵轴
附加的会有双边台架,THC轴等
在系统操作界面按设置(F4)——密码(F5):输入1396——轴(F6)
下面显示 横轴 纵轴 THC 轴(设置了才会有)
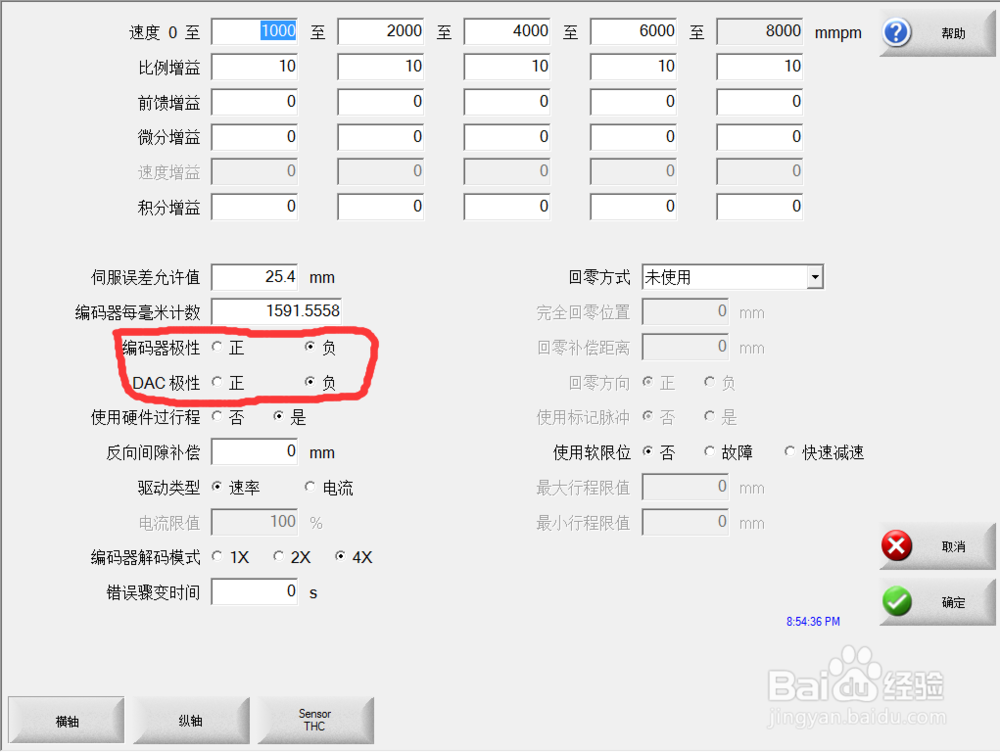
设置参数见附图1 附图2
此处注意将DAC极性和编码器极性为一样的,即同正同负。
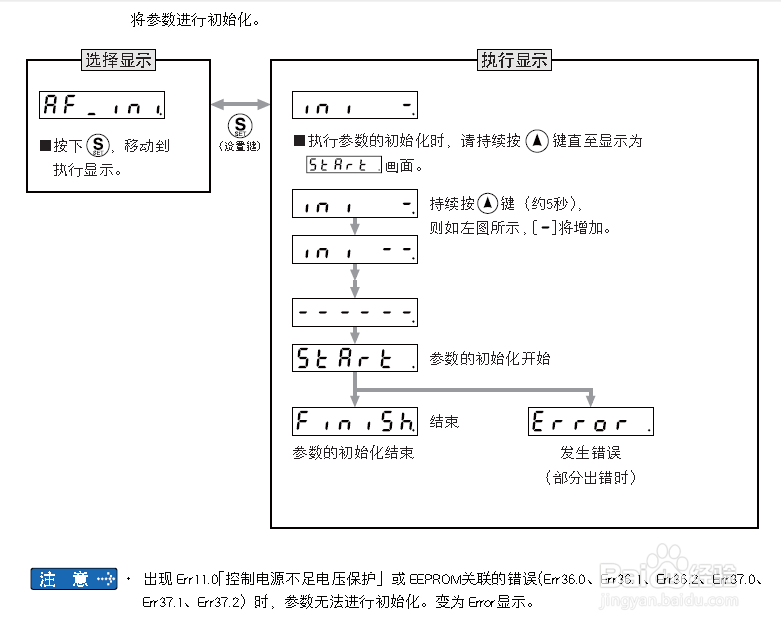
6、调试伺服参数之前,个人建议将伺服驱动器的参数初始化掉
初始化操作见附图1
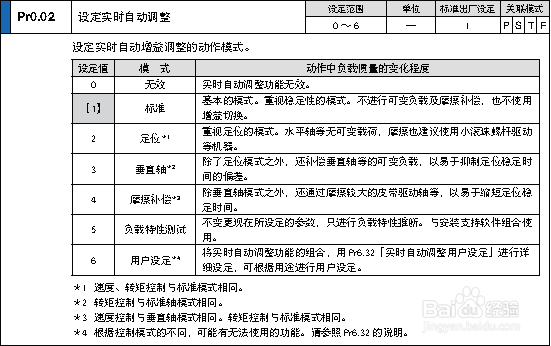
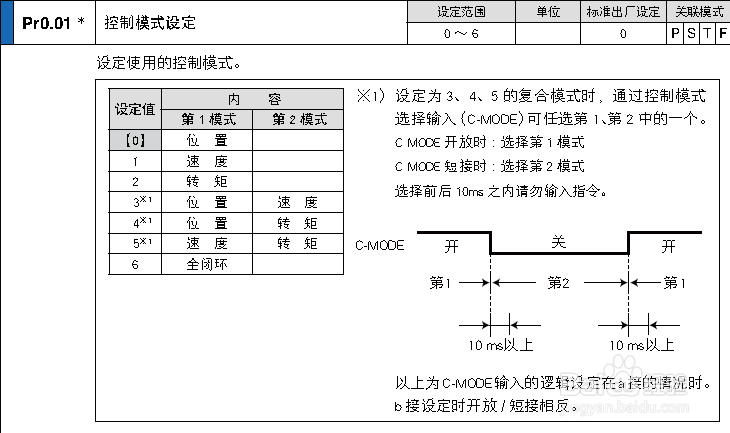
初始化之后首先修改的是伺服的模式——PR001:默认值为0(位置模式)
如是速度模式请修改其值为1
详见附图2 说明
如果副边为位置模式的,请将副边伺服驱动器的 指令脉冲输入模式设定PR007的默认值1修改为0或2(见附图3说明)

7、然后重新启动伺服驱动器,应间隔30秒以上否则可能伺服驱动器会出现与电压相关的报警
启动无报警之后在系统启动点动指令使伺服驱动器运转,观察纵向两电机的旋转方向。
如果主边旋转方向反修改系统的DAC极性和编码器极性与原设定相反即可:设定后需重启伺服;(见步骤5 附图1)
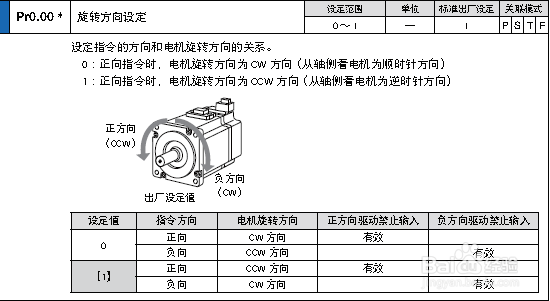
如果副边旋转方向反则修改伺服驱动器的PR000与当前设定值相反。(见附图1)
8、其他相关参数调节
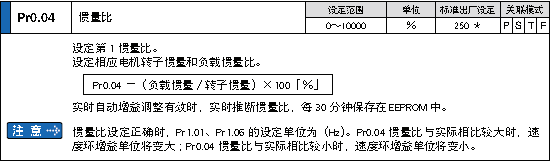
PR002 (详细见附图1):建议将该参数设置为0,特别是纵轴两个驱动,因为打开的话随着机械轨道的变化可以影响PR004的数值,甚至可能一定时间伺服驱动器会出现过载等报警
PR004(详见附图2):该参数可以依据机械参数来调节
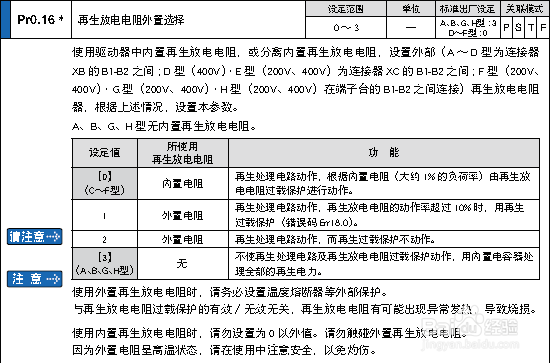
PR016(详见附图3):外部连接了再生电阻才能设置 建议改变为1
调整尺寸精度的伺服参数PR008和PR009 PR010两组只需要设置PR008就可以,如果此时不行的话再设置PR009、PR010。此设置只针对位置模式的数控系统,在海宝系统不需要调节的。
海宝系统只需要调节编码器每毫米计数值参数就可以调整尺寸精度。