1、RobotArt在绘图区右侧有机器人控制面板,接下来详细的了解一下,首先看一下机器人控制面板图
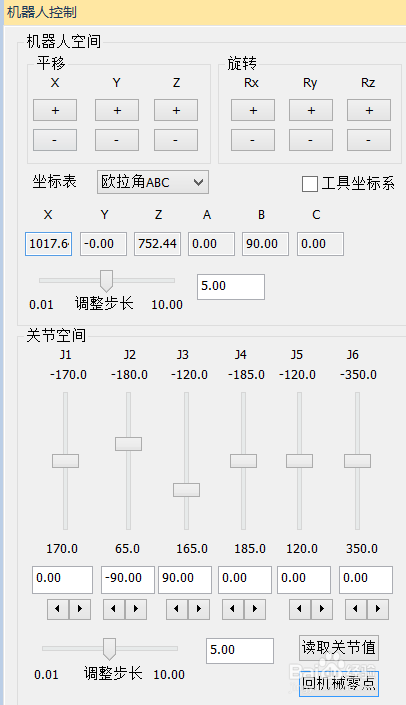
2、机器人控制面板分为两个功能区:机器人空间和关节空间,
1)机器人空间项
机器人空间项中有X、Y、Z、Rx、Ry、Rz六个轴,其中X、Y、Z三个轴代表机器人在坐标系中的当前位姿,Rx、Ry、Rz三个轴代表机器人在坐标系中X、Y、Z的旋转值。
平移-X:机器人会沿X轴移动,当点击+号,会沿X轴正方向,点击-号,机器人会沿X轴负方向移动,Y轴、Z轴同理。
旋转-Rx:机器人会沿X轴旋转,当点击+号,会沿顺时针方向旋转,点击-号,机器人会沿逆时针方向旋转,Ry、Rz同理。
对应轴下面的文本框中的值表示当前该轴的准确值,调整值的方法有两种:①直接拖动滑块来进行调整②点击左右键按钮来进行微调。
步长的范围为0.01-10.00,调整步长的方式有两种①直接拖动滑块来进行调整②在文本框中直接输入步长值。
工具坐标系不勾选即表示机器人当前工作坐标系是世界坐标系,勾选上则为工具坐标系,默认情况为世界坐标系。
2)关节空间项
关节位置调整块向上移动时,关节逆时针方向增大,相反,当滑块向下移动时,关节顺时针方向增大。
六个轴的调整方式和步长的调整同机器人空间项一致。
单击【回机械零点】按钮,则机器人回到初始的位置,即六个轴都为0的状态。
单击【读取关节值】按钮,弹出打开对话框,选择关节值放置的位置,即可自己加载进具体的关节值。