1、打开伺服控制模型。
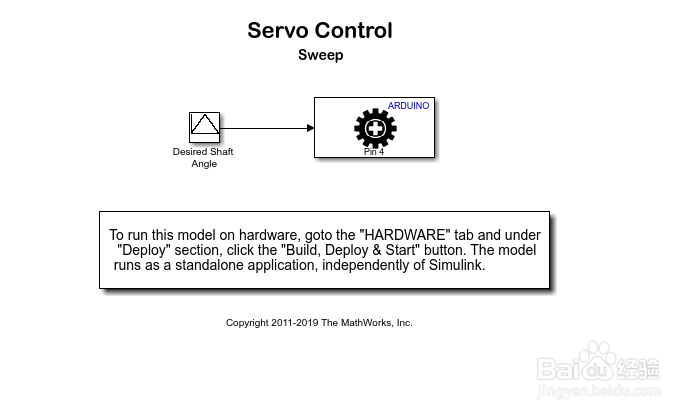
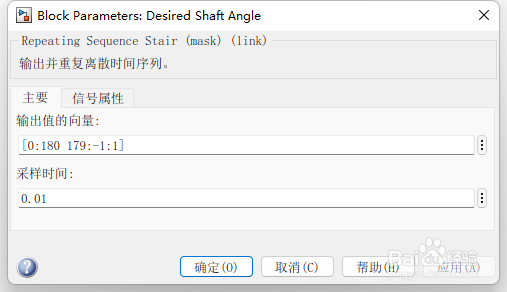
2、注意标准伺服写入块。该块每0.01秒设置一次伺服电机轴的新角度。
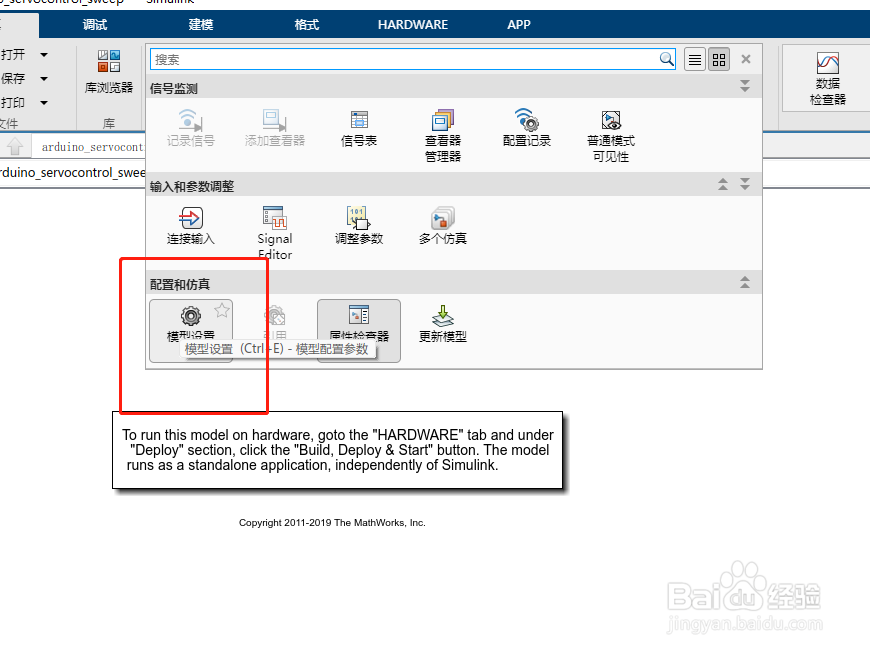
3、在Simulink模型中,单击“仿真”>“模型配置参数”以打开“配置参数”对话框。
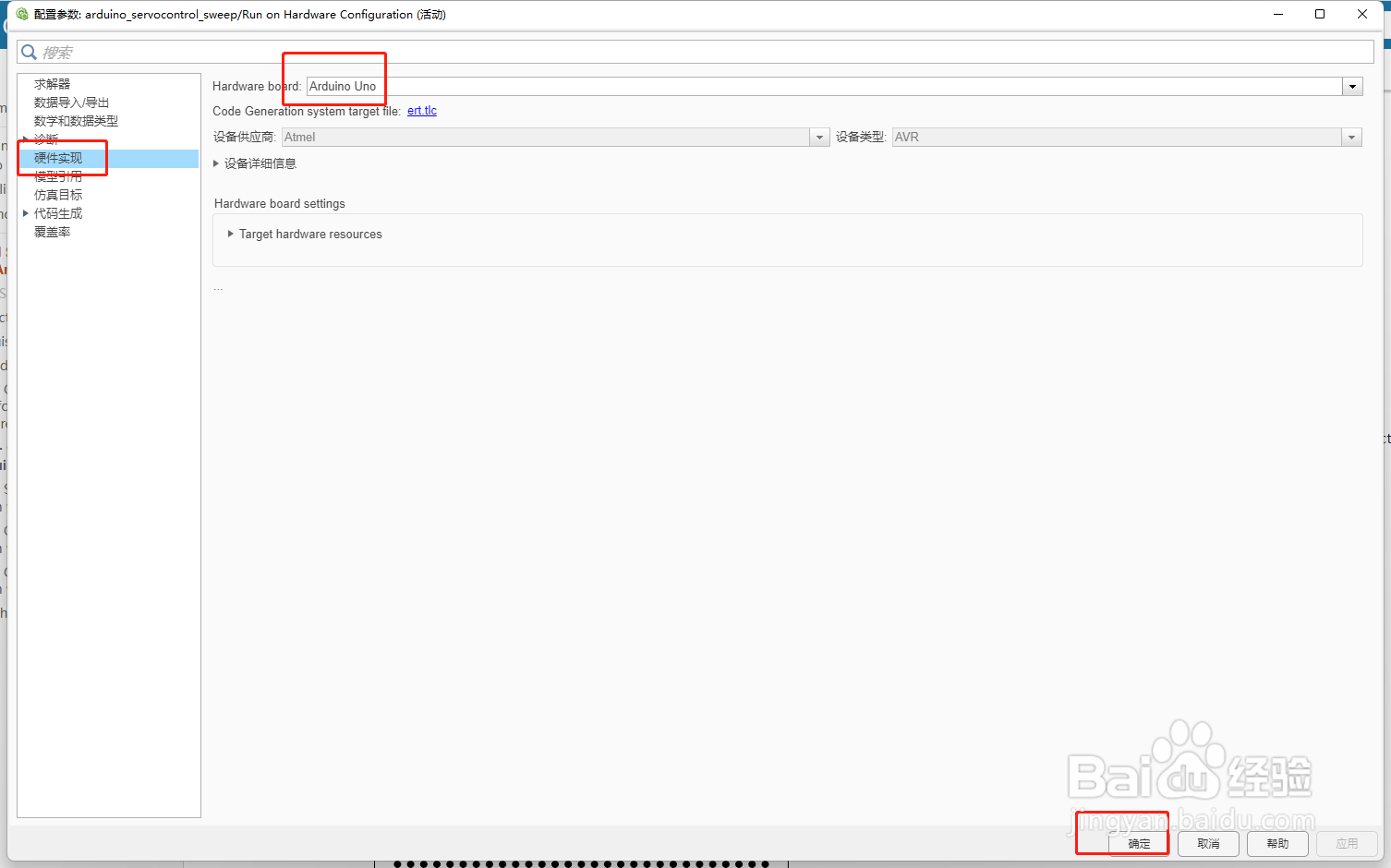
4、选择硬件实现窗格,然后从硬件板参数列表中选择所需的Arduino硬件。不要更改任何其他设置。
5、在Simulink模型的硬件选项卡上的模式部分,选择在板上运行,然后单击构建、部署和启动。
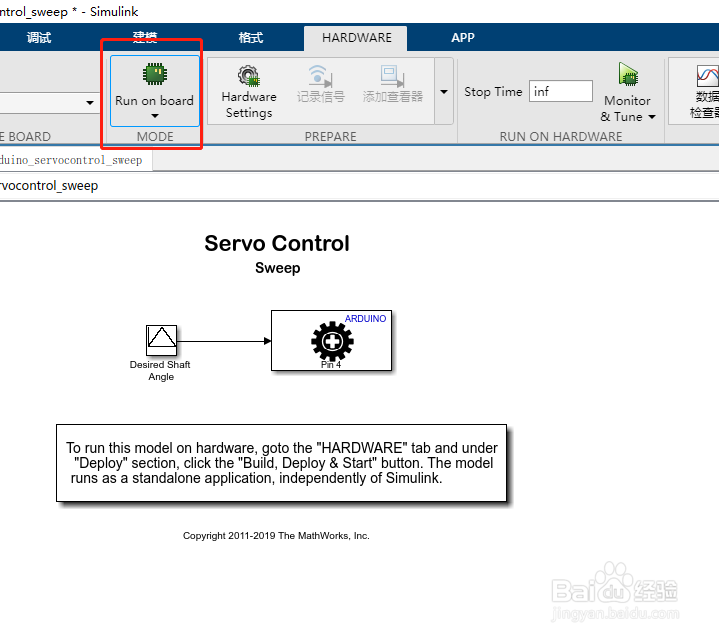
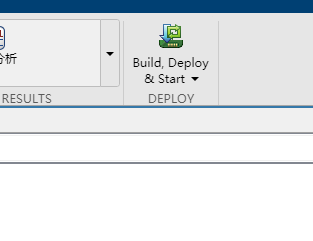
6、当模型开始在Arduino板上运行时,观察电机轴的位置在0到180度之间摆动。

1、打开伺服控制模型。
2、注意标准伺服写入块。该块每0.01秒设置一次伺服电机轴的新角度。
3、在Simulink模型中,单击“仿真”>“模型配置参数”以打开“配置参数”对话框。
4、选择硬件实现窗格,然后从硬件板参数列表中选择所需的Arduino硬件。不要更改任何其他设置。
5、在Simulink模型的硬件选项卡上的模式部分,选择在板上运行,然后单击构建、部署和启动。
6、当模型开始在Arduino板上运行时,观察电机轴的位置在0到180度之间摆动。