1、1.1 SCServo Debug 介绍
SCServo Debug 具备以下功能:
总线上的舵机 ID 搜索;
设置参数,如 ID、波特率、加速度以及位置限制等参数;
查看舵机状态,如舵机当前温度,位置,载荷、电压、电流等;
速度、位置、负载等关键参数动态曲线观测;
舵机固件升级;
舵机性能展示。
1.2 软件界面

2、二、软件界面及功能
2.1 主界面 主界面
主界面主要分为五个区域:
Part 1:串口操作,主要用于串口的打开和关闭。 :串口操作,主要用于串口的打开和关闭。
Com:串口号输入框;Baud:串
行通信波特率选择列表;
Open:打开串口按钮;所有对舵机的操作必须在串口打开的情况下才有效;打开后该
区域 com 处于灰色;
Part 2 :舵机节点搜索,主要用于搜索当前连接到 PC 机的舵机设备。 机的舵机设备。
Search:开始搜索按钮;点击后即以前面设定的模式进行搜索,同时主窗口右侧会出现列
表框,显示当前搜索信息;点击后该按钮变成了“Stop”,再次点击即可停止查询;Clear:
清空列表框中内容;要让舵机运动,必须先在 PART 2 中选中你要操作的舵机。
Part 3:操作页面切换按钮,主要用于不同操作页面之间的切换。 :操作页面切换按钮,主要用于不同操作页面之间的切换。
Part 4:舵机常用操作页面。详细内容见后面介绍。 :舵机常用操作页面。详细内容见后面介绍。
Part 5:系统按钮,用于软件的最小化和退出。

3、2.2 Robot 操作页面 操作页面
Robot 操作页面的功能时对舵机进行基本的设置和监测,包含四个区域:
Part 1:曲线观测; :曲线观测;
本处可以直观的观测速度、位置、负载等关键参数动态曲线;随着不同舵机的连
接,本窗口两侧的数值会依据舵机精度变换;
Part 2:舵机测试运转; :舵机测试运转;
先在 open torque 前面打钩,让舵机扭矩开启;
移动滑块可以让舵机运转
选择不同的写指令,可以测试舵机不同指令下的运动状况;
Speed 速度设置为 0 并且打钩,舵机能达到最大速度运转;
Part 3:绘制曲线,舵机反馈数据开关; :绘制曲线,舵机反馈数据开关;
点击 Draw 按钮曲线观测窗口会显示舵机运转的各种曲线,并且 PART4 窗口
中会反馈舵机发回来的各类数据;
Part 4:状态显示; :状态显示;
GoalPOS:显示左边 PART2 中滑块位置,也就是目标位置,不同舵机范围不同 0-1023
或者 0-4095;
Tem:显示当前舵机的温度,范围 0——80℃;
Voltage:显示当前舵机的工作电压,舵机型号不同,电压范围也不同,详见各型号
产品的规格书;
Load:显示舵机当前负载,舵机不动负载为零;
Position:显示舵机当前位置
Speed:显示当前舵机运转速度
Current:显示当前舵机的电流,部分舵机不支持电流反馈功能
Curcycle:显示步进模式运行了多少圈
Moving:显示当前舵机是否处于运动状态
需要说明的是,只有当 PART3 中的 Draw 开启才会有数据反馈。离开本操作页面时
舵机数据反馈会停止。

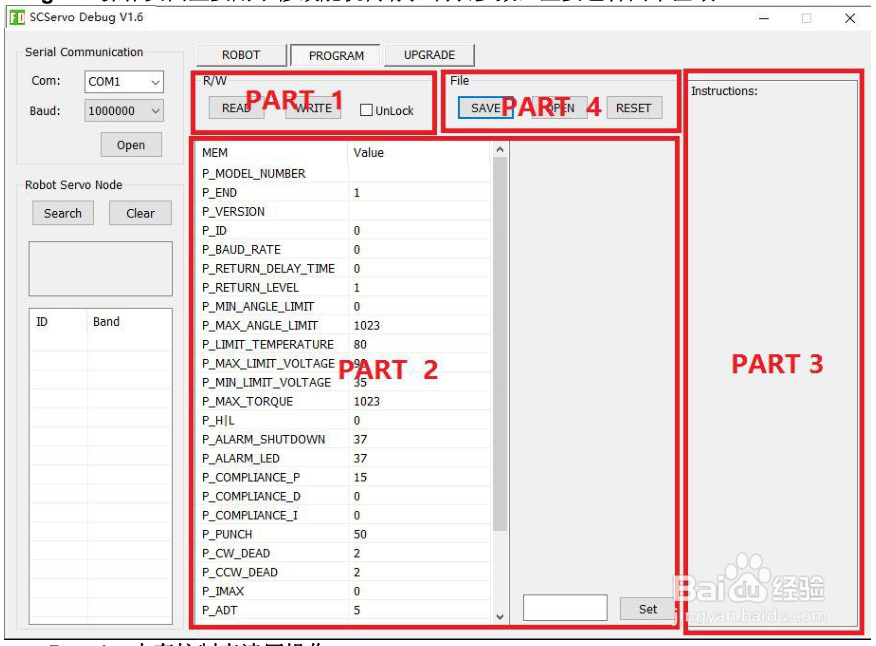
1、2.3 Program 操作页面 操作页面
Program 操作页面主要用于修改舵机内存控制表参数,主要包含四个区域:
Part 1:内存控制表读写操作; :内存控制表读写操作;
选定一个 ID 的舵机,点击 Read 按钮,就能将当前舵机内存控制表的一些可修
改参数读出来,读出来的具体参数值会在 PART 2 里面显示。
修改好内存控制表参数后,点击 Write 按钮,就能将修改好的参数写入到舵机内
存控制表里面。
在对内存控制表进行写入操作时必须将内存控制表锁定打开勾选UNLOCK, ,否
则参数写入后断电重启数据会丢失。(断电不保存)
注意,在修改舵机参数前必须先读取一次当前参数,再进行修改以及写入操作。
(您可以先读取后保存一份原始参数以被不时之需)。切记切记!!!!
Part 2:内存表 :内存表 参数区 ;
内存控制表的一些参数,可以根据舵机规格书进行相应的修改;
内选中需要修改的内存地址,然后在 PART2 框右下角输入需要修改的数值,点击
SET 就可以了。不过最终修改过的内存控制表参数需要点击 Write 写入到舵机。
Part 3: : 读写状态 ;
读取,写入成功失败会在本窗口反馈;
Part 4: : 内存控制表参数保存 ;
保存,读取内存控制表参数。
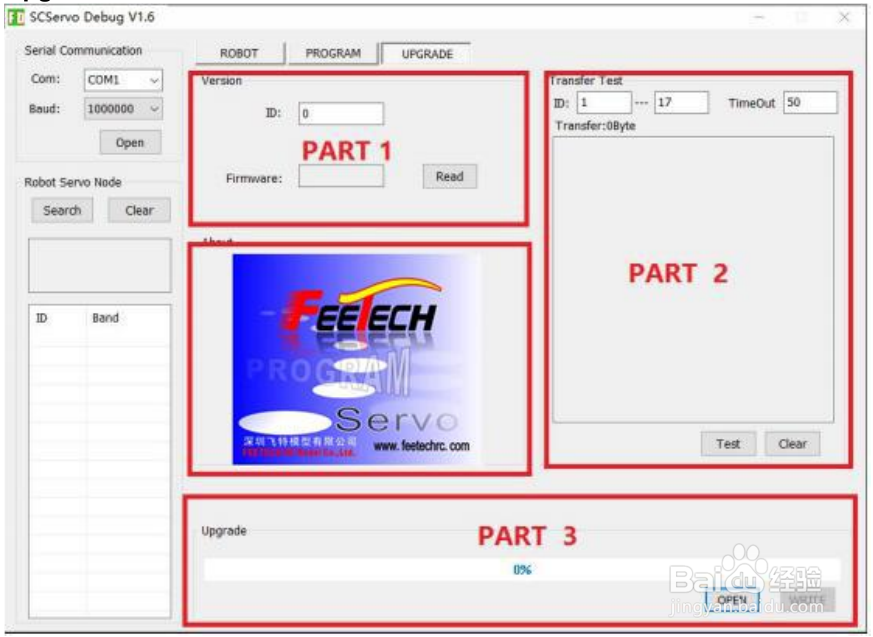
2、2.4 Upgrade 操作页面 操作页面
Upgrade 操作页面 操作页面 主要用于舵机升级及固件版本查询等,包含三个区域:
Part 1: : 用于查询舵机固件版本 ;
Part 2: : 可以测试总线上舵机的通讯状况 ;
Part 3: : 舵机固件升级 ;
舵机的软件会不断的升级以解决舵机存在的问题或者提升性能,用户
拿到升级的固件后,可以使用 o SCServo g Debug 软件自行升级。
选中需要升级固件的舵机,点击 N OPEN 选中固件,然后点击 Write,等进
度条达到 100%就表示升级成功。
上电升级方法:
如果升级过程中意外导致升级中断,舵机无法正常工作,舵机需要采用此方
法。
具体操作方法如下:
1,连接舵机与;USB 转换器,接直流电源。(详参各系列串行舵机与电脑通
讯的连接方法说明)
2,启动 SCServo 软件,打开端口;
3,点击“Upgrade”,进入 Upgrade 操作页面,点击 Open 按钮选择固件;
4,将舵机连接上电的瞬间同时点击 WRITE 按钮,进度条有反应说明开始写入
数据等进度条到达 100%就完成升级。(有可能需要尝试多次)
提示:采用此方法升级只能连接一个舵机,否则无法正常升级。