1、第一章 自动控制的一般概念
1-1 自动控制的基本原理与方式
1-2 自动控制系统示例
1-3 自动控制系统的分类
1-4 对自动控制系统的基本要求
1-5 自动控制系统的分析与设计工具
知识点总结
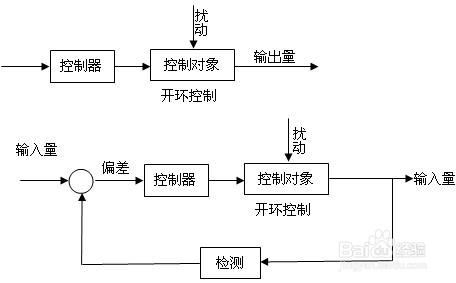
1 闭环系统(或反馈系统)的特征:采用负反馈,系统的被控变量对控制作用有直接影响,即被控变量对自己有控制作用 。
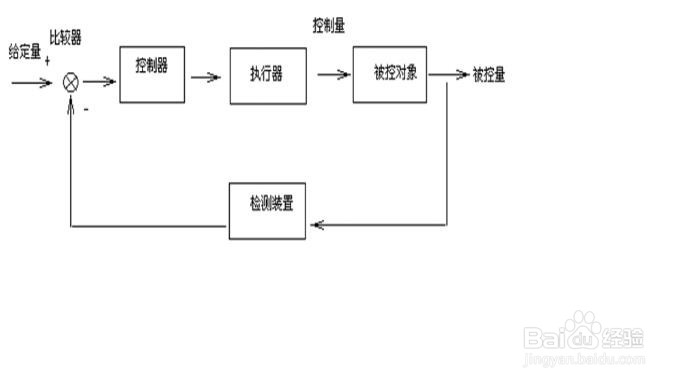
2 典型闭环系统的功能框图。
重要的概念与名词
自动控制 在没有人直接参与的情况下,通过控制器使被控对象或过程按照预定的规律运行。
自动控制系统 由控制器和被控对象组成,能够实现自动控制任务的系统。 被控制量 在控制系统中.按规定的任务需要加以控制的物理量。
控制量 作为被控制量的控制指令而加给系统的输入星.也称控制输入。
扰动量 干扰或破坏系统按预定规律运行的输入量,也称扰动输入或干扰掐入。
反馈 通过测量变换装置将系统或元件的输出量反送到输入端,与输入信号相比较。 反送到输入端的信号称为反馈信号。
负反馈 反馈信号与输人信号相减,其差为偏差信号。
负反馈控制原理 检测偏差用以消除偏差。将系统的输出信号引回插入端与输入信号相减,形成偏差信号。然后根据偏差信号产生相应的控制作用,力图消除或减少偏差的过程。
开环控制系统 系统的输入和输出之间不存在反馈回路,输出量对系统的控制作用没有影响,这样的系统称为开环控制系统。开环控制又分为无扰动补偿和有扰动补偿两种。
闭环控制系统 凡是系统输出端与输入端存在反馈回路,即输出量对控制作用有直接影响的系统,叫作闭环控制系统。
复合控制系统 复合控制系统是一种将开环控制和闭环控制结合在一起的控制系统。它在闭环控制的基础上,用开环方式提供一个控制输入信号或扰动输入信号的顺馈通道,用以提高系统的精度。
组成一个自动控制系统通常包括以下基本元件
1.给定元件
给出与被控制量希望位相对应的控制输入信号(给定信号),这个控制输入信号的量纲要与主反馈信号的量纲相同。给定元件通常不在闭环回路中。
2.测量元件
测量元件也叫传感器,用于测量被控制量,产生与被控制量有一定函数关系的信号
被控制量成比例或与其导数成比例的信号。测量元件的精度直接影响控制系统的精度应使测量元件的精度高于系统的精度,还要有足够宽的频带。
3.比较无件
用于比较控制量和反馈量并产生偏差信号。电桥、运算放大器可作为电信号的比较元件。有些比较元件与测量元件是结合在一起的,如测角位移的旋转变压器和自整角机等。
4.放大元件
对信号进行幅值或功率的放大,以及信号形式的变换.如交流变直流的相敏整流或直流变交流的相敏调制。
5.执行元件
用于操纵被控对象,如机械位移系统中的电动机、液压伺服马达、温度控制系统中的加热装置。执行元件的选择应具有足够大的功率和足够宽的频带。
6.校正元件
用于改善系统的动态和稳态性能。根据被控对象特点和性能指标的要求而设计。校正元件串联在由偏差信号到被控制信号间的前向通道中的称为串联校正;校正元件在反馈回路中的称为反馈校正。
7.被控对象
控制系统所要控制的对象,例如水箱水位控制系统中的水箱、房间温度控制系统中的房间、火炮随动系统中的火炮、电动机转速控制系统中电机所带的负载等。设计控制系统时,认为被控对象是不可改变的,它的输出即为控制系统的被控制量。
8.能源元件
为控制系统提供能源的元件,在方框图中通常不画出。
对控制系统的基本要求
1.稳定性
稳定性是系统正常工作的必要条件。
2.准确性
要求过渡过程结束后,系统的稳态精度比较高,稳态误差比较小.或者对某种典型输入信号的稳态误差为零。
3.快速性
系统的响应速度快、过渡过程时间短、超调量小。系统的稳定性足够好、频带足够宽,才可能实现快速性的要求。
2、第二章 控制系统的数学模型
2-1 控制系统的时域数学模型
2-2 控制系统的复数域数学模型
2-3 控制系统的结构图与信号流图
2-4 控制系统建模实例
知识点总结
1、建立系统的微分方程
2、绘制动态框图并求传递函数。
3、传递函数
在零初始条件下,系统输出量的拉氏变换与输入量的拉氏变换之比称为传递函数。传递函数的概念适用于线性定常单输入、单输出系统。
求传递函数通常有两种方法:对系统的微分方程取拉氏变换,或化简系统的动态方框图。对于由电阻、电感、电容元件组成的电气网络,一般采用运算阻抗的方法求传递函数。
4、结构图的变换与化简
化简方框图是求传递函数的常用方法。对方框图进行变换和化简时要遵循等效原则:对任一环节进行变换时,变换前后该环节的输人量、输出量及其相互关系应保持不变。
化简方框图的主要方法就是将串联环节、并联环节和基本反馈环节用一个等效环节代替。化简方框图的关键是解除交叉结构,即移动分支点或相加点,使被简化的环节中不存在与外部直接相连的分支点和相加点。
5、利用梅森(Mason)公式求传递函数。
3、第三章 线性系统的时域分析法
3-1 系统时间响应的性能指标
3-2 一阶系统的时域分析
3-3 二阶系统的时域分析
3-4 高阶系统的时域分析
3-5 线性系统的稳定性分析
3-6 线性系统的稳态误差计算
3-7 控制系统时域设计
知识点:
控制系统时域动态性能指标的定义与计算
系统稳定性的定义与判断法则
二阶系统动态性能分析以及改善措施
误差的定义、稳态误差的计算以及提高稳态精度的措施
基本要求:
一阶系统阶跃响应的求法以及动态性能指标的计算公式
典型欠阻尼二阶系统动态性能指标的计算、性能指标与特征根的关系
改善二阶系统动态性能指标的方法
主导极点与偶极子的概念及其应用
古尔维茨判据、劳斯判据及其应用
静态误差系数、系统型别、稳态误差的计算
扰动引起的误差的定义与计算方法
减小和消除稳态误差的方法
4、第四章 线性系统的根轨迹法
4-1 根轨迹法的基本概念
4-2 根轨迹绘制的基本法则
4-3 广义根轨迹
4-4 系统性能的分析
4-5 控制系统复域设计
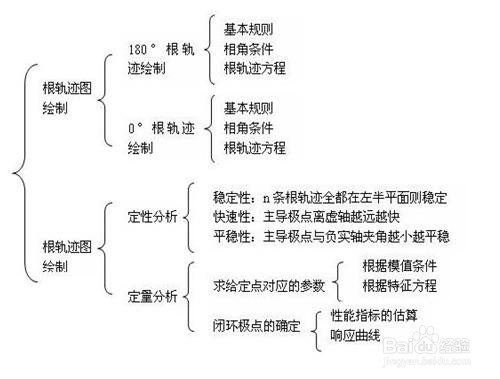
知识点总结
1、根轨迹中,开环传递函数G(s)H(s)的标准形式
2、根轨迹方程 相角条件:绘制根轨迹的充要条件 幅值条件
3、根轨迹法的绘制规则。
4、能用根轨迹法分析系统的主要性能,掌握闭环主导极点与动态性能指标之间的关系。能定性分析闭环主导极点以外的零、极点对动态性能的影响。
5、第五章 线性系统的频域分析法
5-1 频率特性
5-2 典型环节与开环系统的频率特性
5-3 频率域稳定判据
5-4 稳定裕度
5-5 闭环系统的频域性能指标
5-6 控制系统频域设计
6、第六章 线性系统的校正方法
6-1 系统的设计与校正问题
6-2 常用校正装置及其特性
6-3 串联校正
6-4 反馈校正
6-5 复合校正
6-6 控制系统校正设计
线性系统的校正方法知识点总结:
系统的设计与校正问题
常用校正装置及其特性
串联校正
复合校正
基本要求:
串联超前校正和串联滞后校正的实质、作用
串联超前校正网络、串联滞后校正网络、串联滞后-超前校正网络的设计(尤其是希望特性法)、PID校正的特点
复合校正网络的设计
7、第七章 线性离散系统的分析与校正
7-1 离散系统的基本概念
7-2 信号的采样与保持
7-3 z变换理论
7-4 离散系统的数学模型
7-5 离散系统的稳定性与稳态误差
7-6 离散系统的动态性能分析
7-7 离散系统的数字校正
7-8 离散控制系统设计
知识点总结:
离散系统的基本概念
信号的采样与保持
离散系统的数学模型
离散系统的稳定性与稳态误差
动态性能分析
离散系统的数字校正
基本要求:
采样与保持的物理描述与数学描述、香农采样定理
零阶保持器的数学描述及其频率特性
差分方程的概念、差分方程的建立与求解
脉冲传递函数的概念、用Z变换方法求系统的输出响应
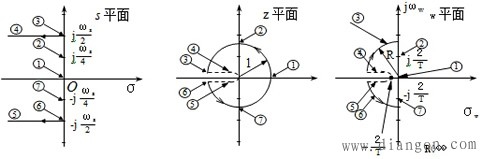
Z域稳定判据、W域稳定判据
离散系统的性能分析
8、第八章 非线性控制系统分析
8-1 非线性控制系统概述
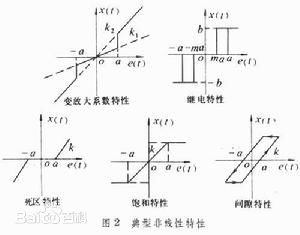
8-2 常见非线性特性及其对系统运动的影响
8-3 相平面法
8-4 描述函数法
8-5 非线性控制的逆系统方法
8-6 非线性控制系统设计
知识点:
非线性控制系统概述
常见非线性特性及其对系统运动的影响 描述函数法
相平面法
基本要求:
非线性系统的等效变换
负倒描述函数曲线的绘制
非线性系统稳定性的判断
自激振荡的判断及自振参数的确定
线性系统的相轨迹绘制
开关线、奇点及其类型、极限环等概念
9、第九章 线性系统的状态空间分析与综合
9-1 线性系统的状态空间描述
9-2 线性系统的可控性与可观测性
9-3 线性定常系统的反馈结构及状态观测器
9-4 李雅普诺夫稳定性分析
9-5 控制系统状态空间设计
第十章 动态系统的最优控制方法
10-1 最优控制的一般概念
10-2 最优控制中的变分法
10-3 极小值原理及其应用
10-4 线性二次型问题的最优控制
10-5 动态规划
10-6 控制系统优化设计