1、(一)设计变量的确定与创建
设计变量主要有两种用途,一种用于参数化建模,一种用作试验中的因素。本课题主要研究四杆机构的尺寸和初始位置对木薯块根拔起速度的影响,所以设计变量为四杆机构的尺寸和初始位置的倾角。
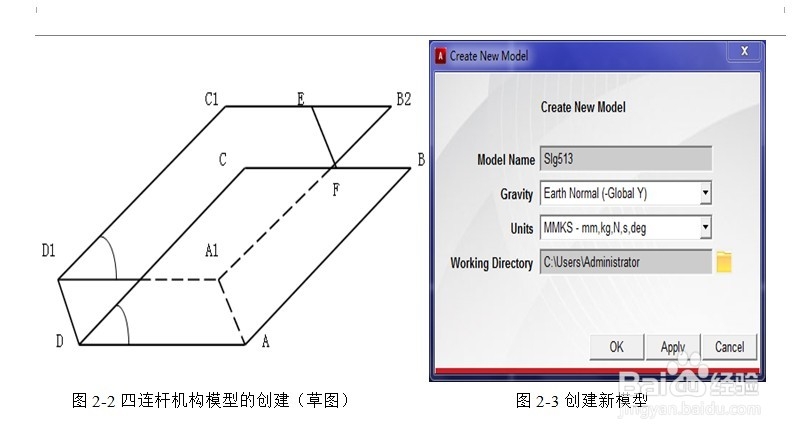
平行四杆机构设计变量的确定,如图2-2所示,主要由AB=LAB、BC=LBC以及初始倾角等参数确定。
设设计变量DV_AB为主、从动连杆的长度,DV_BC为连接杆的长度,DV_CDA为平行四杆机构相对于水平面的初始角度,DV_AA1为两平行四杆机构的水平距离。
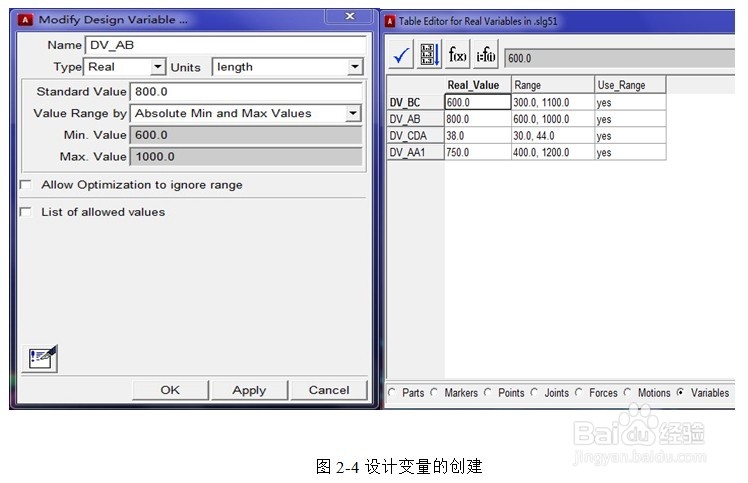
打开ADAMS/View 2012> New Model,设置模型名称为Slg513,其他项选择默认的,点击Ok,如图2-3所示。在用户界面的菜单栏单击Settings/InterfaceStyle/ Classic 切换为经典界面,单击Build/DesignVariable/New,弹出设计变量对话框,分别设置变量名称,变量单位,标准值、变动方式以及最大值最小值,DV_AB、DV_BC、DV_AA1的单位均为Length,DV_CDA单位为Angle,变动方式均采用绝对值的方法来确定设计变量的范围。完成设计变量的创建。创建方法如图2-4所示。
2、(二)建立模型
1.创建参数化点
建立A、B、C、D、A1、B1、C1、D1八个点作为定位点,选择工具栏的创建点按钮,移动鼠标到工作窗口单击,创建定位点,将鼠标置于点上右击/-point:POINT_1/Rename,重命名为A,每创建完一个点后,修改点的名称,以免出现错误或不能正确运行时,能够方便识别错误根源所在。创建完成后,双击任一点,打开几何点的编辑对话框,设A A1的中点为坐标原点,先单击Point_A的Loc_X单元,然后在顶层输入框中单击鼠标右键,在弹出的菜单中选择Parameterize/ReferenceDesign variable ,选择所需要的设计变量,也可以直接输入,根据各构件的设计变量计算出各构件的定位点的坐标,如B点的X轴计算出的值为DV_AB*COS(DV_CDA),以此类推,再用计算出的坐标值代替已建立的坐标点,这样在创建几何点时,将点的参数用设计变量来代替,设计变量的值就是几何点的参数值,通过修改设计变量的值修改点的参数值,点的位置也随之改变。参数化后各点的坐标如图2-5所示。
2. 创建构件
创建各构件的时,单击连杆创建,在工具栏下方勾选Width和Depth,定义构件的宽度为60mm和深度为40mm之后,将各构件直接建在定位点上,就可以实现对构件的参数化。将构件创建在点上,由于构件是关联几何点的,所以通过参数化几何点的位置间接参数化构件,也可以先创建连杆再创建几何点,在创建几何点的时,将几何点创建在构件上,并且选择Attach Near(关联)项。
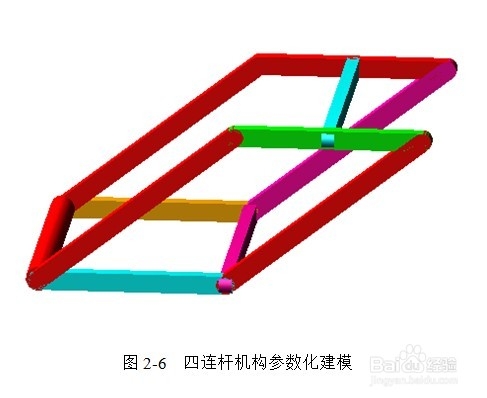
创建梁架:把E点创建在连杆 BC的中点上,并且选择Attach Near项,再参数化,把F点创建在连杆B1C1的中点上,并且选择Attach Near项,再参数化,将构件建在E、F点上,完成梁架的创建,如图2-4所示。创建完成的主要部件的参数化模型如图2-6所示。

3、(三)各部件几何属性和材料属性的添加
为了使仿真得到的结果更加接近实际,需设定构件的材料性质,将鼠标置于构件上单击右键/选择构件名/Modify,弹出修改材料的属性对话框,设定材料性质后,Adams即可根据三维模型自动将计算出的各种数据填入相应的对话框。其中标准件可以直接输入质量。
木薯收获机四连杆机构材料全部选择钢材,采用系统默认的设置即可。
4、(四)四连杆机构虚拟样机约束的添加
约束的添加步骤:选择约束-选择创建约束的方式-创建约束。如第三节图2-2,杆AD、AA1、A1D1为机架,所以将杆AD与杆A A1添加固定副,杆A1D1与A A1添加固定副,使其固连在一起,两主动杆与驱动轴、横梁与两连接杆都添加固定副;从动杆与机架之间添加铰链副,从动杆与连接杆、主动杆与连接杆、主动杆与机架全都添加铰链副;机架与大地之间施加一个滑动副。这样总共添加的约束为8个铰链副、6个固定副、1个移动副。添加约束完成。
5、(五) 添加驱动
可以将驱动建在约束上,也可以在约束上直接添加驱动。由田间实验测得拖拉机的平均移动速度为220mm/s,因此给机架与大地的滑移副添加滑移驱动,驱动速度220mm/s。
拔起驱动的添加:给转动轴间的旋转副添加一个旋转驱动来模拟马达的驱动。参数化后的驱动表达式为
(-56*time**2+521*time+48)/(DV_AB*SQRT(1-(-56*time**3/3/DV_AB+521*time**2/2/DV_AB+48/DV_AB*time+SIN(DV_CDA))**2))
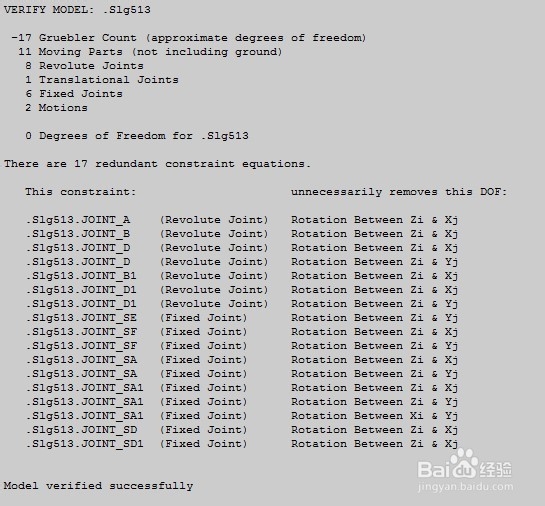
6、(六)四连杆机构模型的验证
对已经创建完成的虚拟样机模型进行验证,以检查其是否正确。Adams自带有模型的验证功能,Adams/View操作界面的右下角带打钩图形的按钮,能够检验模型的约束、自由度、驱动等信息。带感叹号的按钮,可以查看到已建模型的所有信息,方便对模型进行检查。在Adams中,有时运动副个数与实际情况相同,但还是会产生过约束,这通常是在一个封闭的回路中产生的[22]。在过约束情况下,系统在求解时会自动解除一些约束,在被解除约束的自由度上就不会计算构件之间的相互作用力,因此要尽量避免过约束。模型验证虽然仍有过约束,但这并不影响我们进行运动学的仿真,结果如图2-7所示。