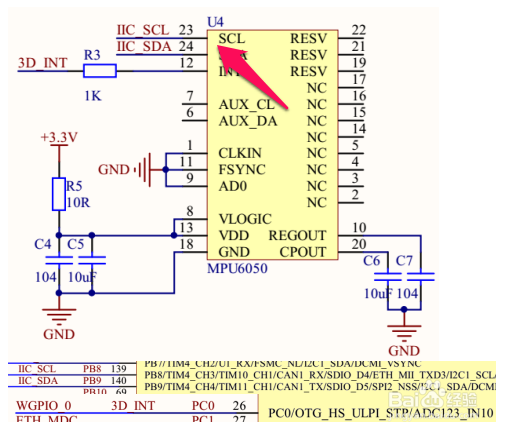
1、下图是开发学习板上MPU6050和板子的连接原理图,从下图中可以看出,连接比较简单,只是使用了三个引脚,引脚23和引脚24是用来使用I2C协议进行数据传输的,引脚12是用来中断使用的,如果不使用中断,那么引脚12也可以不进行连接,如下图:
2、对MPU6050进行编程除了自己编写的代码之外,还需要MPU6050芯片公司自己提供的一个DMP解算库文件,下图的几个文件就是DMP的解算库,将这几个文件复制并包含到项目中,如下图:

3、下图就是项目的代码,左侧是项目结构,可以看出还是比较复杂的,我们先对项目进行编译观察实验现象,然后再研究代码,如下图:

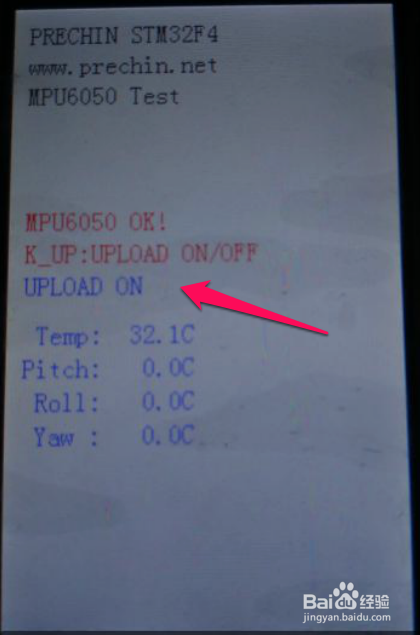
4、编译无误之后将程序下载到开发学习板中,然后按上键将数据上传设置为开启,否则无法观察接下来的实验现象,如下图:
5、然后打开 匿名四轴上位机,按照下图所示步骤点击【基本功能】,然后在步骤2也就是基本设置面板,设置对应的端口号以及波特率等,然后点击步骤3【打开串口】,如下图:

6、然后按照下图中箭头指示步骤点击【飞控状态】,然后点击【高级收码】,然后转动自己的开发学习板,就可以看到上位机中的小四轴飞机跟着在动了,如下图:
