1、要完成规划式清扫完成需要通过以下四个重要步骤:定位-构图-规划-清扫。其原理可解释为:扫地机器人利用导航定位系统记住起点和清扫路径的坐标,构建环境地图,同时计算规划清扫线路,然后利用陀螺仪纠正扫地机器人清扫路线不跑偏。说起来有些深奥,但也可简单的类比为手机导航去到某个地方的规划方式。从实现原理中不难发现:如果没有定位,构建的地图会出现误差,地图不准确规划效率就低,如果效率太低与随机式扫地机器无异。因此,定位技术是规划式扫地机器人的基本点和关键中的关键。

1、定位就好比人的感官,让扫地机能准确知道自己的位置,为实现规划清扫做准备,目前使用的技术有RPS激光定位系统、vSLAM图像位移定位系统、无线载波室内定位系统。
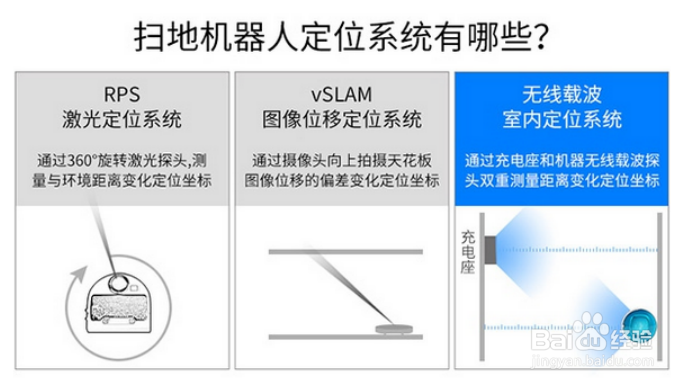
2、RPS激光定位系统:通过360°不断旋转的激光探头,测量扫地机器人与环境距离变化来实现定位。这种定位系统最大的缺点就是探头价格昂贵,而且工作时需要不停地旋转,寿命很有限;
vSLAM图像位移定位系统:通过扫地机器人配备高清摄像头向上拍摄天花板图像的偏差变化定位坐标,这种移定位系统对天花板上有参照物的要求比较高,如果参照物的特征信息或者几何形状模糊,定位精度将受到大大的影响;
无线载波室内定位系统:通过在充电座和机器人无线载波探头双重测量距离变化定位坐标。这种定位方式得到的坐标精度较高。
3、在选择智能规划式扫机器人时还要警惕一种状况:市面上有些品牌的扫地机器人通过使用高精陀螺仪优化行走路径,让扫地机器人能实现弓形清扫路径,但因为实现方式上没有使用定位技术,本质上还是随机式在单一的区域内能有比较好的表现,但遇到多房间的清扫其能力就与随机式扫地机器人没有多大的区别了。

4、从智能规划性能的对比上来看,行业内几大品牌的优劣也十分明显,iRobot和proscenic都运用的是定位精准、实现方式简单的无线载波室内定位系统。机器拥有精准的感官能力,聪明的运算大脑和执行能力强大清扫组件这样的扫地机器人才是真正意义上智能规划式扫地机。